Download
1 / 35
350 likes | 456 Views
Algorithms for cooperative multisensor surveillance. Page(1~13/22). IEEE JNL.

E N D
Algorithms for cooperative multisensor surveillance Page(1~13/22)
IEEE JNL • Algorithms for cooperative multisensor surveillanceCollins, R.T.; Lipton, A.J.; Fujiyoshi, H.; Kanade, T.;Proceedings of the IEEEVolume 89, Issue 10, Oct. 2001 Page(s):1456 - 1477 Digital Object Identifier 10.1109/5.959341 AbstractPlus | References | Full Text: PDF(624 KB) | Full Text: HTML IEEE JNL
Index(1/2) • Introduction • Large project in the world • Multisensor Surveillance challenges • Surveillance Tested Background • Surveillance Tested Preliminary • Architecture • Surveillance Tested • Control station integration all sensors • Surveillance site model
Index(2/2) • Moving object detection • Adaptive background subtraction • Layer detection • Pixel analysis • Layer detection result • Object type classification • Human motion analysis • Distance detection • Error rate measurement overview(1/2)
Introduction • VSAM team in the CMU • CMU ( Carnegie Mellon University) • Old surveillance is “after fact” System • A new system that have facility to prevent the crime. • Automatic detect the unusual event • Alarm the suspicious event • Detect object in the cluttered environment
Large Project in the world • Large research project devoted to video surveillance have been conducted in • US – VSAM (video surveillance and monitoring) • Europe • ESPRIT PASSWORDS • AVS-PV • VIEWS • Japan • The cooperative Distributed Vision Project
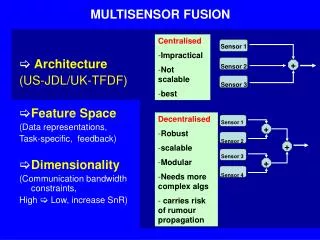
Multisensor Surveillance challenges • Actively control sensors • Fuse information to scene-level object • Monitor the event and tigger further processing • GUI for visualization and system tasking • Identify human walking and running
Surveillance Tested Background • Placement of cameras • In the current VSAM • Tested system.
Surveillance Tested preliminary • OCU (operator control unit) • SPU (sensor processing unit) • VIS (visualization nodes)
Surveillance site model • 由已知的背景知識我們可以做 • Computation of object location • Landmark-based calibration of camera exterior orientation • Improve object tracking by predict • Trace the object • Describe the object move route • Classifier object type (describe later) • Visualization • Simulation for planning best sensor placement.
Moving object detection • Temporal differencing • Background subtraction • Optical flow
Adaptive background subtraction • Statistical average of intensity at each pixel • Potentially containing a moving object • Problem : object disappear • Car enter a park and stopped. • The car shouldn’t consider as background. • Its stationary pixels play a role of background as detection motion of a person moving out of the car.
Layer detection • Two processes • Pixel analysis • Determine pixel is stationary or transient • Observe the intensity over time • Moving object have much more intensity change than lighting in bad weather • Region analysis
Object type classification(1/2) • Neural network classifier • Three layer network • Backpropagation • Input features • Image • Bolb area • Camera zoom value • Camera settings • Output features • Single human • Human group • Vehicle and clutter
Object type classification(2/2) • 2 submodules • Classify object shap • Determining the color • LDA • Feature vector • Training examples are mapped into shap space as 11 dimensional feature vector. • Color space is 3 dimensional. • I1 = 10*(R+G+B)/3 • I2 = 100*(R-B)/2 • I3 = 100*(2*G – R – B)/4
Object type classification(2/2) • K-NN • Calculate the most likely class in the LDA space • Object type include • UPS car • Campus police car • Mule: golf-car-like • The reason why system not work well • Raining or snowing • Early morning or late evenings • Backlighting and specular reflection
Human motion analysis • Most algorithm assume that the person’s image is enough to track limbs • “star” skeletonization procedure • Decide the centroid • Traversing the boundary • A person is walking or running? • The frequency of cyclic motion of the leg segment
Error rate measurement(1/2) • Real world distance is test by the theodolite • Formula to calculate the error rate