Download
1 / 3
30 likes | 333 Views
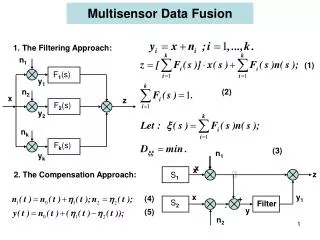
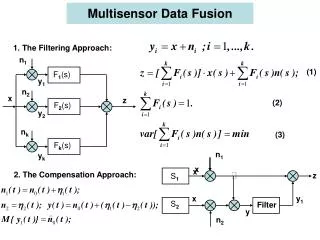
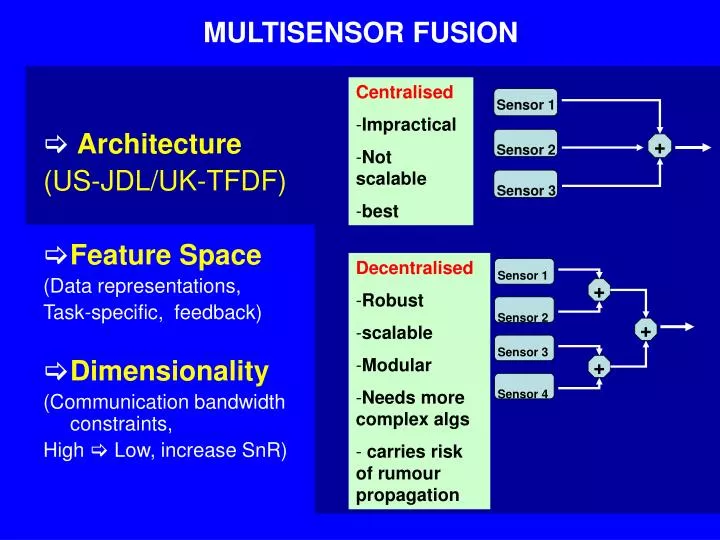
Sensor 1. +. Sensor 2. +. Sensor 3. +. Sensor 4. Sensor 1. +. Sensor 2. Sensor 3. MULTISENSOR FUSION. Centralised Impractical Not scalable best. Architecture (US-JDL/UK-TFDF) Feature Space (Data representations, Task-specific, feedback) Dimensionality

E N D
Sensor 1 + Sensor 2 + Sensor 3 + Sensor 4 Sensor 1 + Sensor 2 Sensor 3 MULTISENSOR FUSION • Centralised • Impractical • Not scalable • best • Architecture (US-JDL/UK-TFDF) • Feature Space (Data representations, Task-specific, feedback) • Dimensionality (Communication bandwidth constraints, High Low, increase SnR) • Decentralised • Robust • scalable • Modular • Needs more complex algs • carries risk of rumour propagation
MULTISENSOR FUSION • Data, sensor, communication noise, high level ignorance, model uncertainty • `soft’ decisions – Bayesian inference framework… but …. • Incorrect use of independence between models Veto Effect • Inaccurate estimation of probabilities can lead to severe distortion of decisions (product rule dominated by low probability errors) • Simpler decision methods more robust • Uncertainty • Dynamics • Fusion is an iterative dynamical process • - Continually refining estimates, representations ..
MULTISENSOR FUSION • How do constraints on communication bandwidth and processing limit architectures for fusion? • How does the brain create and modify its data representation? • How does the brain encode time, dynamics and use feedback? • How does the brain encode and process probabilities and uncertain knowledge? Effective Sensor Fusion requires key elements: How does the Brain deal with the same problems? Apart from very low level (cellular/subcellular) and very high level binding, the brain appears to leave data sources fragmented. Why? (interesting clinical exception in synaesthesia! – do we learn ICA?)