Download
1 / 21
210 likes | 361 Views
Representation of Objects with Sharp Details in Truncated Distance Fields. Pavol Novotn ý Comenius University , Bratislava, Slovakia Miloš Šrámek Austrian Academy of Sciences, Vienna, Austria. Outline. Object representation by truncated distance fields ( TDFs )

E N D
Representation of Objects with Sharp Details in Truncated Distance Fields Pavol Novotný Comenius University, Bratislava, Slovakia Miloš Šrámek Austrian Academy of Sciences, Vienna, Austria
Outline • Object representation by truncated distance fields (TDFs) • CSG operations with voxelized solids (related technique) • Proposed technique: Voxelization of implicit solids with sharp details in TDFs • Results and future work VG 2005
Distance Fields • Distance to the object surface is stored in voxels • Inside and outside area can be distinguish using different signs • Surface can be reconstructed by interpolation and thresholding • Distance estimation for implicid solids defined by function f(X) = 0 can be done as follows: VG 2005
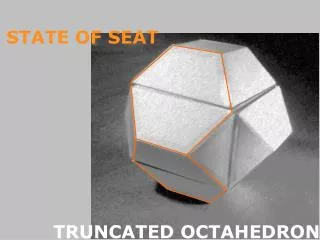
Object Representation by TDFs Volume is divided into three areas: • Inside • Outside • Transitional: • In the surface vicinity • Thickness: 2r • Stored values: • density (distance from the surface) • direction of the density gradient (surface normal) VG 2005
Problem of Sharp Details • Edge artifacts • A problem of representation VG 2005
The Object Representability Criterion [Baerentzen 2000] • Only solids with smooth surfaces without sharp details are representable in a discrete grid • The criterion: • It is possible to roll a sphere of the given radius rfrom both sides of the surface • r : • defines thickness of the transitional area • determined by the reconstruction filter VG 2005
CSG Operations [ Novotný, Dimitrov, Šrámek: CGI’04 ] • The result of CSG operations often contains sharp details VG 2005
Representable CSG Solids • To avoid artifacts, edges of CSG solids must be rounded! CSG solid with artifacts A representable CSG solid VG 2005
Our Earlier Results CSG solids with artifacts Representable CSG solids VG 2005
Voxelization of Implicit Solids:An SDC Method Problem: • Implicit solids can contain sharp details (artifacts) The proposed solution: • Round edgesto get representable objects VG 2005
SDC Method – Overview • Stage 1: • Evaluate voxels in a standard way • Identify critical areas • Stage 2: • Extrapolate values from non-critical areas (linearly) • Compute final values of voxels by approximation: CSG intersection of two halfspaces • Stage 1: • Evaluate voxels in a standard way • Identify critical areas • Stage 2: • Extrapolate values from non-critical areas (linearly) • Compute final values of voxels by approximation: CSG intersection of two halfspaces • Stage 1: • Evaluate voxels in a standard way • Identify critical areas • Stage 2: • Extrapolate values from non-critical areas (linearly) • Compute final values of voxels by approximation: CSG intersection of two halfspaces • Stage 1: • Evaluate voxels in a standard way • Identify critical areas • Stage 2: • Extrapolate values from non-critical areas (linearly) • Compute final values of voxels by approximation: CSG intersection of two halfspaces Stage 1: • Evaluate voxels in a standard way • Identify critical areas Stage 2: • Extrapolate values from non-critical areas (linearly) • Compute final values of voxels by approximation: CSG intersection of two halfspaces VG 2005
Stage 1 – Overview • Voxelization inside, outside and transitional voxels • Identification of critical voxels • Adjustment of the critical area • Voxelization inside, outside and transitional voxels • Identification of critical voxels • Adjustment of the critical area • Voxelization inside, outside and transitional voxels • Identification of critical voxels • Adjustment of the critical area • Voxelization inside, outside and transitional voxels • Identification of critical voxels • Adjustment of the critical area VG 2005
Stage 1 – Details • Voxelization of solids defined by an implicit equation: f(X) = 0 • Distance estimation: • Identification of the critical area – the normal consistency test: VG 2005
Stage 2 – Extrapolation Transfer density and normal values from faces through the critical area by front propagation: • Initialization – find critical voxels neighbouring with transitional area • Fronts may overlap • Transfer density and normal values from faces through the critical area by front propagation: • Initialization – find critical voxels neighbouring with transitional area • Fronts may overlap • Transfer density and normal values from faces through the critical area by front propagation: • Initialization – find critical voxels neighbouring with transitional area • Fronts may overlap • Transfer density and normal values from faces through the critical area by front propagation: • Initialization – find critical voxels neighbouring with transitional area • Fronts may overlap Active front propagation VG 2005
Stage 2 – Final Evaluation • At the end of the front propagation – each critical voxel stores several values of density and gradient (description of several halfspaces) • Resulting value:CSG intersection of halfspaces (according to our previous paper) • More than two faces: sequential calculation VG 2005
Results VG 2005
Dependency on the Grid Resolution 64 64 64 128 128 128 256 256 256 512 512 512 VG 2005
Time Complexity • 30-65% increase of processing time for all the tested objects and grid resolutions • Important factor – size of the critical area: • sharpness of edges • length of edges VG 2005
Open Problems • Solids with non-convex sharp details proper combination of CSG intersection and union needed non-trivial analysis necessary VG 2005
Conclusion • SDC method – alias-free voxelization of implicit solids with sharp details • Main idea: rather smooth edges than jaggy • It works correctly for a number of objects, but the solution is still not universal Future work: • Extend the technique also for solids with non-convex sharp details VG 2005
Thank you for attention. • Emails: • novotny@sccg.sk • milos.sramek@oeaw.ac.at VG 2005