Download
1 / 15
150 likes | 259 Views
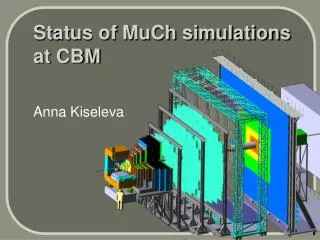
Status of MuCh software. Outline Straws in Much design Segmentation algorithms Cluster deconvolution algorithms Timing in MuCh Study of dead zone effects. Evgeny Kryshen (PNPI) Mikhail Ryzhinskiy (PNPI & SPbSPU). Three geometry types. Module design. Straw design. Simple design.

E N D
Status of MuCh software • Outline • Straws in Much design • Segmentation algorithms • Cluster deconvolution algorithms • Timing in MuCh • Study of dead zone effects Evgeny Kryshen (PNPI) Mikhail Ryzhinskiy (PNPI & SPbSPU)
Three geometry types Module design Straw design Simple design CBM Collaboration meeting @ Split, 7 October 2009
Geometry input file: much_standard_straws.geo # General information MuchCave Zin position [cm] : 105 Acceptance tangent min : 0.1 Acceptance tangent max : 0.5 Number of absorbers : 6 Number of stations : 6 # Absorber specification Absorber Zin position [cm] : 0 40 80 120 170 225 Absorber thickness [cm] : 20 20 20 30 35 100 Absorber material : I I I I I I # Station specification Station Zceneter [cm] : 30 70 110 160 215 340 Number of layers : 2 2 2 3 3 3 Detector type : 1 1 1 2 2 2 Distance between layers [cm]: 10 10 10 7 7 7 Support thickness [cm] : 1.5 1.5 1.5 0.0 0.0 0.0 Use module design (0/1) : 1 1 1 0 0 0 # GEM module specification (type 1) Active volume lx [cm] : 25.6 Active volume ly [cm] : 25.6 Active volume lz [cm] : 0.3 Spacer lx [cm] : 0.5 Spacer ly [cm] : 5 Overlap along y axis [cm] : 2 # Straw module specification (type 2) Straw thickness [cm] : 0.4 CBM Collaboration meeting @ Split, 7 October 2009
Straw visualizer CBM Collaboration meeting @ Split, 7 October 2009
Automatic segmentation Simple design Module design // Number of stations seg->SetNStations(6); // Set minimum allowed resolution for each station Double_t sigmaXmin[] = {0.08, 0.08, 0.08, 0.08, 0.08, 0.08}; Double_t sigmaYmin[] = {0.08, 0.08, 0.08, 0.08, 0.08, 0.08}; seg->SetSigmaMin(sigmaXmin, sigmaYmin); // Set maximum allowed resolution for each station Double_t sigmaXmax[] = {0.6, 0.6, 0.6, 0.6, 0.8, 1.}; Double_t sigmaYmax[] = {0.6, 0.6, 0.6, 0.6, 0.8, 1.}; seg->SetSigmaMax(sigmaXmax, sigmaYmax); // Set maximum occupancy for each station Double_t occupancyMax[] = {0.05, 0.05, 0.05, 0.05, 0.05, 0.05}; seg->SetOccupancyMax(occupancyMax); CBM Collaboration meeting @ Split, 7 October 2009
Manual segmentation Module design Simple design // Number of regions for each station Int_t nRegions[] = {5, 3, 1, 1, 1, 1}; seg->SetNRegions(nRegions); // Set region radii for each station Double_t st0_rad[] = {13.99, 19.39, 24.41, 31.51, 64.76}; seg->SetRegionRadii(0, st0_rad); … // Set minimum pad size/resolution in the center region for each station Double_t padLx[] = {0.1386, 0.4, 0.8, 0.8 ,0.8, 0.8}; seg->SetMinPadLx(padLx); Developed by M. Ryzhinskiy CBM Collaboration meeting @ Split, 7 October 2009
Cluster deconvolution problem CBM Collaboration meeting @ Split, 7 October 2009
Cluster deconvolution Q Qmax Qthr Primary cluster Hit coordinates: Hit errors: Qthr(Qmax) = 0.1Qmax pads CBM Collaboration meeting @ Split, 7 October 2009
Ward’s method Error Sum of Squares: j – cluster index; n – number of elements in the cluster; xi – vector of variables characterizing the element; N – total number of clusters. thr pads • On the 1st step each pad is considered as a cluster consisting of one element (pad); • Calculate ESS for the current configuration; • Group all possible clusters into pairs looking for the minimal difference =ESSnew – ESScurrent. If found, save the new configuration; • Repeat the procedure until thr; Developed by Misha Ryzhinskiy CBM Collaboration meeting @ Split, 7 October 2009
Divisive method • On the first step all pads are grouped into one cluster; • Look for the element which has maximal mean distance between other pads in the cluster; • If found, delete it from the cluster and put in the newly created one; • Look for elements in the first cluster which have maximal difference i and move them to the new cluster until i<0; • Disentangle clusters until Developed by Misha Ryzhinskiy CBM Collaboration meeting @ Split, 7 October 2009
Number of points in clusters 99.5% 97% 89% 10% 3% 0.5% 0.6% 0.05% 0.01% 50% 60% 45% 89% 30% 10% 9% 5% 0.6% • 1- and 2-pad clusters are dominated by one MC-point; • 3- and 4-pad have non-negligible contribution from two MC-points; • 5- and 6-pad clusters have almost equal contribution of one and two MC-points as well as some fraction of 3 MC-points. Developed by Misha Ryzhinskiy CBM Collaboration meeting @ Split, 7 October 2009
Number of points in clusters 1 point 2 points 3 points 4 points May the cluster charge give a hint about the number of tracks? Developed by Misha Ryzhinskiy CBM Collaboration meeting @ Split, 7 October 2009
Timing in digis and hits CBM Collaboration meeting @ Split, 7 October 2009 Semi-realistic timing model has been implemented: • MC time information can extracted from CbmMuchPoints. • Time in digis is defined by Gaussian smearing of the MC time for the first track contributed to the digi. • Hit time is defined as an average between digi times. Hit time dispersion is defined as a sum of digi-time dispersions divided by the number of digis in the cluster. • One can set the digi time uncertainty in the macro with the method: CbmMuchDigitizeAdvancedGem::SetDTime(). • Realistic uncertainty for GEMs is of the order of 2-3 ns. 3 ns are used by default. • Acceptable timing pulls: sigma = 0.89.
Study of dead zone effects Front side Back side Overlap X spacer Y spacer Dead zone CBM Collaboration meeting @ Split, 7 October 2009 No dead zones in y direction Realistic spacer width in x direction ~ 5mm ~ 4% dead zone in x-direction ( ~ 2* 5 / 250 ) Reconstruction requirement: at least one hit between absorbers, three hits at the last trigger station. Reconstruction efficiency is normalized to MC muons from signal J/psi decays. Pure dimuons (without background) are considered
Conclusions and next steps CBM Collaboration meeting @ Split, 7 October 2009 Conclusions: • New much software is working reasonably well. • Many bugs were corrected thanks to the users. • Further tests are necessary (especially with straw option). • Advanced cluster deconvolution algorithms were implemented, but appeared hardly suitable in our case Next steps • Module design for straw stations • Realistic straw digitization and hit finding algorithms (in collaboration with A. Zinchenko) • Further investigation of cluster deconvolution algorithms • Parameter tuning • Waiting for beam test results • Join layout study business