Download
1 / 1
10 likes | 171 Views
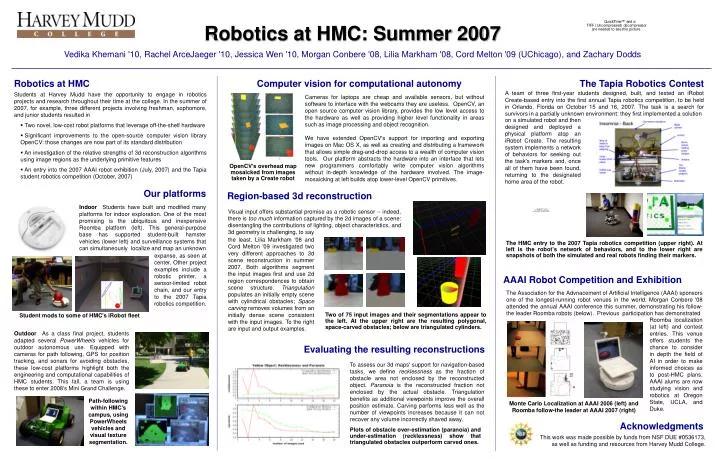
Robotics at HMC: Summer 2007 Vedika Khemani '10, Rachel ArceJaeger '10, Jessica Wen '10, Morgan Conbere '08, Lilia Markham '08, Cord Melton '09 (UChicago), and Zachary Dodds. Robotics at HMC. Computer vision for computational autonomy. The Tapia Robotics Contest.

E N D
Robotics at HMC: Summer 2007 Vedika Khemani '10, Rachel ArceJaeger '10, Jessica Wen '10, Morgan Conbere '08, Lilia Markham '08, Cord Melton '09 (UChicago), and Zachary Dodds Robotics at HMC Computer vision for computational autonomy The Tapia Robotics Contest Students at Harvey Mudd have the opportunity to engage in robotics projects and research throughout their time at the college. In the summer of 2007, for example, three different projects involving freshman, sophomore, and junior students resulted in • Two novel, low-cost robot platforms that leverage off-the-shelf hardware • Significant improvements to the open-source computer vision library OpenCV: those changes are now part of its standard distribution • An investigation of the relative strengths of 3d reconstruction algorithms using image regions as the underlying primitive features • An entry into the 2007 AAAI robot exhibition (July, 2007) and the Tapia student robotics competition (October, 2007) A team of three first-year students designed, built, and tested an iRobot Create-based entry into the first annual Tapia robotics competition, to be held in Orlando, Florida on October 15 and 16, 2007. The task is a search for survivors in a partially unknown environment: they first implemented a solution Cameras for laptops are cheap and available sensors, but without software to interface with the webcams they are useless. OpenCV, an open source computer vision library, provides the low level access to the hardware as well as providing higher level functionality in areas such as image processing and object recognition. We have extended OpenCV's support for importing and exporting images on Mac OS X, as well as creating and distributing a framework that allows simple drag-and-drop access to a wealth of computer vision tools. Our platform abstracts the hardware into an interface that lets new programmers comfortably write computer vision algorithms without in-depth knowledge of the hardware involved. The image-mosaicking at left builds atop lower-level OpenCV primitives. on a simulated robot and then designed and deployed a physical platform atop an iRobot Create. The resulting system implements a network of behaviors for seeking out the task's markers and, once all of them have been found, returning to the designated home area of the robot. OpenCV's overhead map mosaicked from images taken by a Create robot Our platforms Region-based 3d reconstruction Indoor Students have built and modified many platforms for indoor exploration. One of the most promising is the ubiquitous and inexpensive Roomba platform (left). This general-purpose base has supported student-built hamster vehicles (lower left) and surveillance systems that can simultaneously localize and map an unknown Visual input offers substantial promise as a robotic sensor -- indeed, there is too much information captured by the 2d images of a scene: disentangling the contributions of lighting, object characteristics, and 3d geometry is challenging, to say the least. Lilia Markham '08 and Cord Melton '09 investigated two very different approaches to 3d scene reconstruction in summer 2007. Both algorithms segment the input images first and use 2d region correspondences to obtain scene structure. Triangulation populates an initially empty scene with cylindrical obstacles; Space carving removes volumes from an initially dense scene consistent with the input images. To the right are input and output examples. The HMC entry to the 2007 Tapia robotics competition (upper right). At left is the robot's network of behaviors, and to the lower right are snapshots of both the simulated and real robots finding their markers. expanse, as seen at center. Other project examples include a robotic printer, a sensor-limited robot chain, and our entry to the 2007 Tapia robotics competition. AAAI Robot Competition and Exhibition The Association for the Advnacement of Artificial Intelligence (AAAI) sponsors one of the longest-running robot venues in the world. Morgan Conbere '08 attended the annual AAAI conference this summer, demonstrating his follow-the leader Roomba robots (below). Previous participation has demonstrated Two of 75 input images and their segmentations appear to the left. At the upper right are the resulting polygonal, space-carved obstacles; below are triangulated cylinders. Student mods to some of HMC's iRobot fleet Roomba localization (at left) and contest entries. This venue offers students the chance to consider in depth the field of AI in order to make informed choices as to post-HMC plans. AAAI alums are now studying vision and robotics at Oregon State, UCLA, and Duke. Outdoor As a class final project, students adapted several PowerWheels vehicles for outdoor autonomous use. Equipped with cameras for path following, GPS for position tracking, and sonars for avoiding obstacles, these low-cost platforms highlight both the engineering and computationalcapabilities of HMC students. This fall, a team is using these to enter 2008's Mini Grand Challenge. Evaluating the resulting reconstructions To assess our 3d maps' support for navigation-based tasks, we define recklessness as the fraction of obstacle area not enclosed by the reconstructed object. Paranoia is the reconstructed fraction not enclosed by the actual obstacle. Triangulation benefits as additional viewpoints improve the overall position estimate. Carving performs less well as the number of viewpoints increases because it can not recover any volume incorrectly shaved away. Path-following within HMC's campus, using PowerWheels vehicles and visual texture segmentation. Monte Carlo Localization at AAAI 2006 (left) and Roomba follow-the leader at AAAI 2007 (right) Acknowledgments Plots of obstacle over-estimation (paranoia) and under-estimation (recklessness) show that triangulated obstacles outperform carved ones. This work was made possible by funds from NSF DUE #0536173, as well as funding and resources from Harvey Mudd College.