Download
1 / 60
630 likes | 844 Views
Laparoscopic Surgery Training System. MediTronics Inc. CEO Alexander Hahn CTO Mark Jung CFO Han-Lim Lee April 2007. Roles in Project.

E N D
Laparoscopic Surgery Training System MediTronics Inc. CEO Alexander Hahn CTO Mark Jung CFO Han-Lim Lee April 2007
Roles in Project • Alexander Hahn (CEO) - Software developer, Technical writing • Mark Jung (CTO) - Software and Hardware developer, Finance Management • Han-Lim Lee (CFO) - Hardware developer, Time management
Presentation Outline • Background • Goals • Proposed Solution • System Overview • Hardware • Software • Business Case • Budget/Timeline • Conclusion
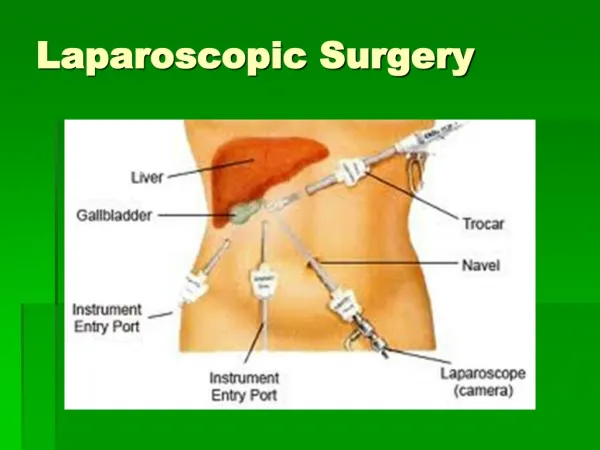
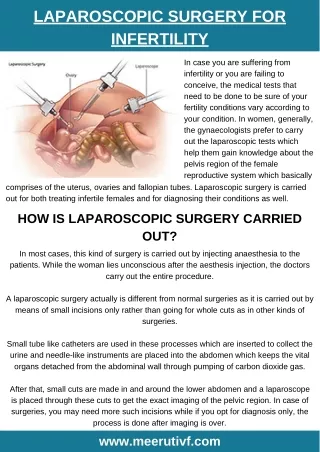
What’s Laparoscopic Surgery? • Minimally invasive surgery • Gas-inflated abdomen • Laparoscope and tools
Why Laparoscopic Surgery? Small incision • Speed up recovery times • Minimize post-operative pain • Reduce the chances of infection • Minimize the size of scars
The Problems Unusual surgery environment
The Problems Difficulty in use of the tools
Current Systems in the market • Pure simulation software - Limitation in getting hands-on experience - Lack of physical feeling • Pure physical training system - No automated feedback - Eye examination required
Goals • Providing an physical training system • Providing an automated feedback & evaluation system A hybrid training system of physical and virtual feature
System Overview SurgiBox Computer
Tools System Overview
FSR sensor System Overview
System Overview Sensor feedback circuitry
System Overview Moving task
System Overview Cutting task
System Overview Suturing task
Hardware Outline • Hardware System Overview • Force during surgeries • FSR vs Strain Gauge • FSR Verification • Transmitter and Receiver Circuit • Alternative Design Option • Possible Future Work
Force During Surgeries • Highest Force Peak = 2.3 N • Lowest Force Peak = 0.2 N • For liver, as low as 0.05 N http://www.mech.kuleuven.be/micro/pub/medic/Paper_Eurosenso s_2003_MIS_sensor_extended.pdf.
Force Limit Maximum Force measured to tear off beef 2.0 N ( 0.2N < 2.0N <2.3N) 2.0 N is set as a force limit and correspond to 2.9 Voltin the system.
Force Sensing Resistor How to measure force? VS FSR Strain Gauge • http://www.drrobot.com/products_item.asp?itemNumber=FSR400 • http://www.omega.com/literature/transactions/volume3/strain.html
Force Sensing Resistor Advantage: • Cheaper • Ideal for our system Advantage: • Smaller in Size FSR Strain Gauge Disadvantage: • Bigger than Semi-conductor S.G. Disadvantage: • Strain Changes without Gripping
FSR Verification FSR 400 is used and currently the smallest fsr in the market
Transmitter and Receiver Transmitter Side: • Force on the gripper is compared with our limit force (2.9V) • Analog to digital conversion • Transfer signal serially to the receiver
Transmitter and Receiver Transmitter Side:
Transmitter and Receiver Receiver Side: • Transfer the received data to pc through serial port • Receives signal from transmitter when limit exceeds
Transmitter and Receiver Receiver Side:
Transmitter connected with tool Transmitter and Receiver
FSR attached on tool tip Transmitter and Receiver
Transmitter and Receiver Transmitter from top-view
Receiver with serial port connected Transmitter and Receiver
Alternative Design Option Without using RF module
Alternative Design Option Use PCB instead of Vector Board
Future Work - Hardware • Use both FSR and Strain Gauge • Research and experiment on real human tissue for setting force limit • Varying force limit according to different surgery types • PCB instead of vector board • Research on smaller FSR or other components to measure force
Test Program – Moving Task Before moving task After moving task
Test Program – Cutting Task Before cutting task After cutting task
Test Program – Suturing Task Before suturing task After suturing task
Image Processing • Final Solution : Colour Quantization • Simple • Effective
User Interface • Simple Interface • Main Control “The Green Arrow”
User Interface • Task Selection • Very Basic Controls
User Interface • Task Mode
Evaluation • Performance time – timer in the test program • Gripping force – FSR sensor • Accuracy – Image processing
Evaluation • Quality > Speed
Problems Encountered • Difficult Programming Language • MFC • Serial Data Collection • FSR Sensor Data • Image Processing • Colours • Complexity
Future Work - Software • Modifying our test programs - providing random shape for cutting - various target locations for moving • Add new test programs - Knot tying - Suction • Add more feedback sensors - Checking tightness of suturing/tying task
Market Plan • Target market - Hospital - Medical school - Research Laboratory • Provide an on-site training
Competitors • Simulab Corporation • Physical training system with digital camera (excluding PC) • $1795.00 http://www.simulab.com/LaparoscopicSurgery.htm