Download
1 / 2
20 likes | 177 Views
ROV LATIS Factsheet Ver. 1.2 3 Oct 2008. ROV LATIS A smart multi-mode vehicle. Reducing survey times and increasing the quality of survey data capture. Higher Levels of Operational Flexibility Operates as Surface tow, thrusted pontoon or submersible survey class ROV/AUV

E N D
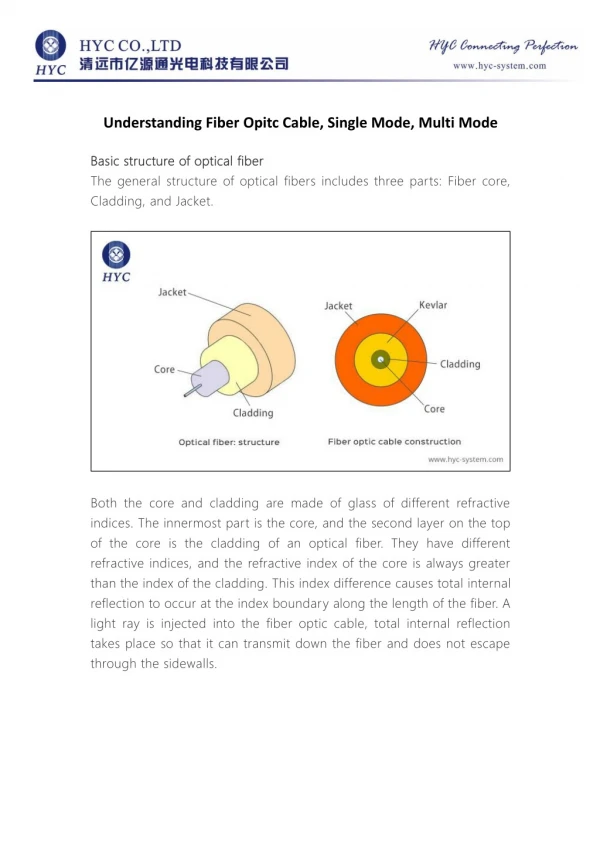
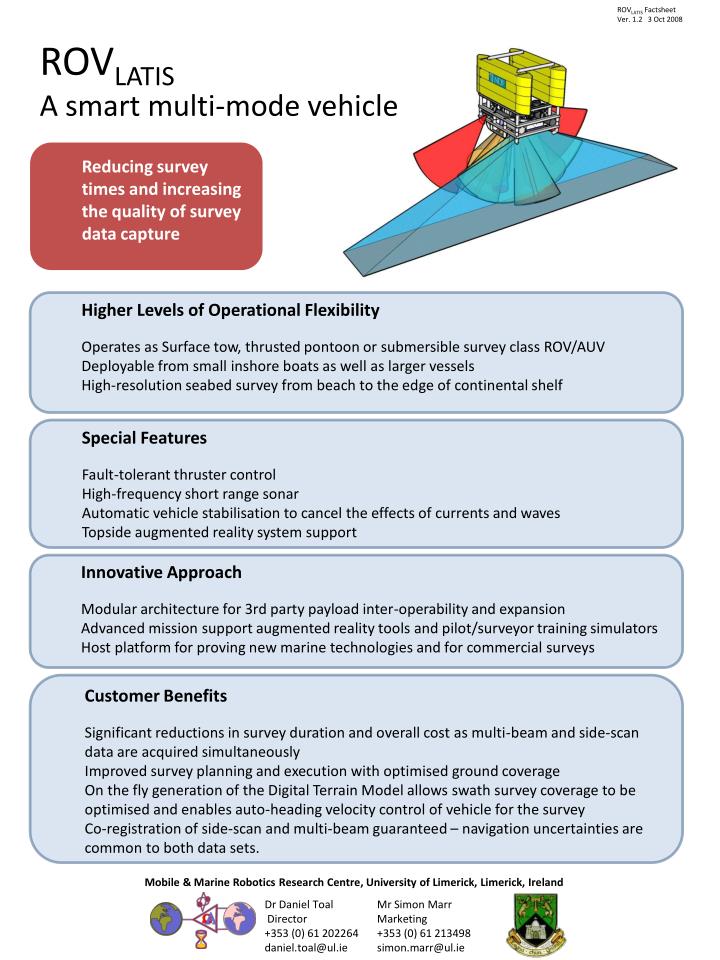
ROVLATIS FactsheetVer. 1.2 3 Oct 2008 ROVLATISA smart multi-mode vehicle • Reducing survey times and increasing the quality of survey data capture • Higher Levels of Operational Flexibility • Operates as Surface tow, thrusted pontoon or submersible survey class ROV/AUV • Deployable from small inshore boats as well as larger vessels • High-resolution seabed survey from beach to the edge of continental shelf • Special Features • Fault-tolerant thruster control • High-frequency short range sonar • Automatic vehicle stabilisation to cancel the effects of currents and waves • Topside augmented reality system support • Innovative Approach • Modular architecture for 3rd party payload inter-operability and expansion • Advanced mission support augmented reality tools and pilot/surveyor training simulators • Host platform for proving new marine technologies and for commercial surveys • Customer Benefits • Significant reductions in survey duration and overall cost as multi-beam and side-scan data are acquired simultaneously • Improved survey planning and execution with optimised ground coverage • On the fly generation of the Digital Terrain Model allows swath survey coverage to be optimised and enables auto-heading velocity control of vehicle for the survey • Co-registration of side-scan and multi-beam guaranteed – navigation uncertainties are common to both data sets. Mobile & Marine Robotics Research Centre, University of Limerick, Limerick, Ireland Dr Daniel Toal Director +353 (0) 61 202264daniel.toal@ul.ie Mr Simon Marr Marketing +353 (0) 61 213498simon.marr@ul.ie
Technical Specification • To follow the vehicle’s progress through commissioning please contact us to join our new ROVLATIS mailing list or monitor results atwww.rovlatis.ie Mobile & Marine Robotics Research Centre, University of Limerick, Limerick, Ireland Dr Daniel Toal Director +353 (0) 61 202264daniel.toal@ul.ie Mr Simon Marr Marketing +353 (0) 61 213498simon.marr@ul.ie