Download
1 / 12
120 likes | 270 Views
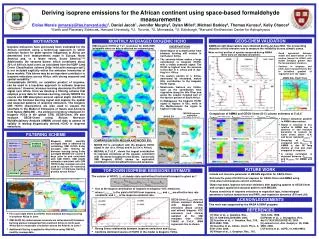
Motivation. A visually impaired student on a powered wheelchair Increasing needs of Assistive Technology (intelligent wheelchair) Recent advancement of Robot Technology Prototype (small scale) of autonomous robot navigation. Problem Statement. 1. Robot navigation (hallway, unstructured) .

E N D
Motivation • A visually impaired student on a powered wheelchair • Increasing needs of Assistive Technology (intelligent wheelchair) • Recent advancement of Robot Technology • Prototype (small scale) of autonomous robot navigation
Problem Statement 1. Robot navigation (hallway, unstructured) • Corridor recognition (machine vision) • Collision avoidance (fuzzy logic control) 2. Robot system design (reusability, modularity) • Multi-platform component (Java, layered architecture) • Easy increment of another agent with minimal developmental cost (multi-agent w/ BB) • Quick development of a prototype system (ER-1: a commercial robot kit)
Hardware Layer Component Layer AGENT AGENT AGENT AGENT Approach 1. Incremental Design • Behavior-based approach • Complete agents 2. Layered Architecture • Hardware Layer – C++ (ER1 SDK) • Component Layer – JAVA 3. Platform Independence • Write once, Run anywhere
Camera Infrared Hardware 1. ER 1 Personal Robot System • Chassis • Wheels • Motors • Power module • Battery Front view 2. Sensors • Camera (x1) • Infrared Sensors (x9) Side view 3. Laptop Computer • Windows XP • USB ports Rear view
Environment Corridor Recognizer Drive Controller Blackboard Camera IRs ? Sensor Handler Collision detector Driver Driver Driver Sensor Handler Software 1. Multi-Agent Architecture • Blackboard as a medium • Decentralization • Independent Agent • Distributed intelligence 2. Agents • Sensor Handler • Drive Controller • Fuzzy Collision Detector • Corridor Recognizer
Final Result Corridor: YES Wall: NO Obstacle: NO 160x120 RGB Grayscale Gaussian filter Thinning Thresholding Sobel detector Corridor Recognition Agent 1. Image Segmentation • Gaussian smoothing filter • Sobel edge detector • Adaptive thresholding • Thinning operator 2. Feature Extraction and Recognition • Hough transform • Histogram-based intensity analysis
Environment Crisp Sensor Input Left sensor = 255 FUZZIFICATION Linguistic Variable Inputs Left sensor input is large Collision detector (Fuzzy) IF left sensor input is largeTHEN right-turn angle is large. Fuzzy Inference Corridor Recognizer Linguistic Variable Outputs Right-turn angle is large. Drive Controller DEFUZZIFICATION Crisp Navigation Parameter Outputs Turn-angle = -30˚ Blackboard Sensor Handler Collision Avoidance Agent 1. Fuzzy Logic • Input fuzzification • Rule matching • Defuzzification 2. Advantages • Dealing with uncertainty • Fast and non-linear computation • Robust and adaptive • Easy to modify
Experiment Examples • Corridor Recognition • Only with Collision Avoidance • Obstacle Avoidance Behavior • Door Navigation Behavior
Results I : Robot Performance 1. Corridor Recognition • Successful identification of corridors • Success rate drops in identifying walls and obstacles 2. Fuzzy-based Collision Detection • Retardation caused by ambient light • Advisability of fuzzy rules 3. Control Mechanism • Problems found in knowledge synchronization • In need of handling false claims
Summary • Feasibility in applying a multi-agent system for robot control • Platform independence realized by employing a layered architecture and Java technology • Corridor recognition using Machine Vision techniques proven to be effective • Safe navigation with fuzzy logic collision detection • Problems found in navigation
Future Work • Implementing a module for managing information on the blackboard • An agent for scheduling tasks resolving conflicts • Vision-based landmark recognition • An agent with a neuro-fuzzy controller for learning an environment so that no manual calibration is necessary
A Mobile Robot For Corridor Navigation: Multi-Agent Approach Y. Ono, H. Uchiyama, and W. Potter Artificial Intelligence Center The University of Georgia SEACM, April, 2004