Download
1 / 21
380 likes | 1.01k Views
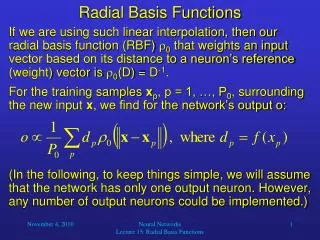
Interpolation By Radial Basis Function ( RBF ). By: Reihane Khajepiri , Narges Gorji Supervisor: Dr.Rabiei. 1. Introduction. Our problem is to interpolate the following tabular function :. Where the nodes and. The interpolation function has the form

E N D
Interpolation ByRadial Basis Function(RBF) By: ReihaneKhajepiri, NargesGorji Supervisor: Dr.Rabiei
1. Introduction • Our problem is to interpolate the following tabular function: Where the nodes and . • The interpolation function has the form such that ’s are the basis of a prescribed n-dimensional vector space of functions on , i.e., .
This is a system of linear equations in unknowns. It can be written in matrix form as , or in details as • The matrixappearing here is called the interpolation matrix. • In order that our problem be solvable for any choice of arbitrary , it is necessary and sufficient that the interpolation matrix be nonsingular. • The ideal situation is that this matrix be nonsingular for all choices of distinct nodes .
Classical methods for numerical solution of PDEs such as finite difference, finite elements, finite volume, pseudo-spectral methods are base on polynomial interpolation. • Local polynomial based methods (finite difference, finite elements and finite volume) are limited by their algebraic convergence rate. • MQ collection methods in comparison to finite element method have superior accuracy.
Global polynomial methods such as spectral methods have exponential convergence rate but are limited by being tied to a fixed grid. Standard" multivariate approximation methods (splines or finite elements) require an underlying mesh (e.g., a triangulation) for the definition of basis functions or elements. This is usually rather difficult to accomplish in space dimensions > 2. • RBF method are not tied to a grid but to a category of methods called meshless methods. The global non polynomial RBF methods are successfully applied to achieve exponential accuracy where traditional methods either have difficulties or fail. • RBF methods are generalization of Multi Quadric RBF , MQ RBF have a rich theoretical development.
2. Literature Review • RBF developed by Iowa State university, Rolland Hardy in 1968 for scattered data be easily used in computations which polynomial interpolation has failed in some cases. RBF present a topological surface as well as other three dimensional shapes. • In 1979 at Naval post graduate school Richard Franke compared different methods to solve scattered data interpolation problem and he applied Hardy's MQ method and shows it is the best approximation & also the matrix is invertible.
In 1986 Charles Micchelli a mathematician with IBM proved the system matrix for MQ is invertible and the theoretical basis began to develop. His approach is based on conditionally positive definite functions. • In 1990 the first use of MQ to solve PDE was presented by Edward Kansa. • In 1992 spectral convergence rate of MQ interpolation presented by Nelson &Madych.
Originally, the motivation for two of the most common basis meshfree approximation methods (radial basis functions and moving least squares methods) came from applications in geodesy, geophysics, mapping, or meteorology. • Later, applications were found in many areas such as in the numerical solution of PDEs, artificial intelligence, learning theory, neural networks, signal processing, sampling theory, statistics ,finance, and optimization.
It should be pointed out that meshfree local regression methods have been used independently in statistics for more than 100 years. • Radial Basis Function "RBF" interpolate a multi dimensional scattered data which easily generalized to several space dimension & provide spectral accuracy. So it is so popular
3. RBF Method3.1 Radial Function • In many applications it is desirable to have invariance not only under translation, but also under rotation & reflection. This leads to positive definite functions which are also radial. Radial functions are invariant under all Euclidean transformations (translations, reflections & rotations) • Def: A function is called radial provided there exist a univariate function such that • where r = And is some norm on , usually the Euclidean norm.
For a radial function : • () = ) . • By radial functions the interpolation problem becomes insensitive to the dimension s of the space in which the data sites lie. • Instead of having to deal with a multivariate function (whose complexity will increase with increasing space dimension s) we can work with the same univariate function for all choices of s.
3.2 Positive Definite Matrices & Functions • Def : A real symmetric matrix A is called positive semi-definite if its associated quadratic form is non negative (1) For c= • If the only vector c that turns (1) into an equality is the zero vector , then A is called positive definite. • An important property of positive definite matrices is that all their eigenvalues are positive, and therefore a positive definite matrix is non-singular (but certainly not vice versa).
Def: A real-valued continuous function is positive definite on if & only if • (2) • For any N pairwise different points & c = • The function is strictly positive definite on if the only vector c that turns (2) into an equality is the zero vector.
3.3 Interpolation of scattered data • One dimensional data polynomial &fourier interpolation has the form: S(x) = : basis function {} : are distinct • For any set of basis function independent of data points & sets of distinct data points {} such that the linear system of equation for determining the expansion coefficient become non-singular {Haar theorem} • Def: An n-dimensional vector space of functions on a domain is said to be a Haar space if the only element of which has more than n-1 roots in is the zero element.
Theorem1. Let have the basis . These properties are equivalent: • is a Haar space. • for any set of distinct points • Any basis for a Haar space is called Chebyshev system. • A Haar space is a space of functions that guarantees invertibility of the interpolation matrix. • Some examples of Chebyshev systems on : • 3) • 4), , … ,
3-4 development of RBF method • Hardy present RBF which is linear combination of translate of a single basis function that is radially symmetric a bout its center. • S = is determined • Problems in Continuously differentiability of S result to the following form: S= c Which is a linear combination of translate of the hyperbola basis function.
Accurate representation of a topographic profile in more than one dimensional space S = S S = S = S =
3.5 RBF categories: • We have two kinds of RBF methods • Basis RBF • Augmented RBF • RBF basic methods: • n distinct data points {} & corresponding data values {}, • The basic RBF interpolant is given by • Micchelli gave sufficient conditions for φ(r) to guarantee that the matrix A is unconditionally nonsingular. • RBF method is uniquely solvable.
Types of basis function: • Infinitely smooth RBF • Piecewise smooth RBF