Download
1 / 20
200 likes | 364 Views
Project #3: Design of a MEMS Vertical Actuator. Jianwei Heng Alvin Tai ME128 Spring 2005. Introduction.

E N D
Project #3:Design of a MEMS Vertical Actuator Jianwei Heng Alvin Tai ME128 Spring 2005
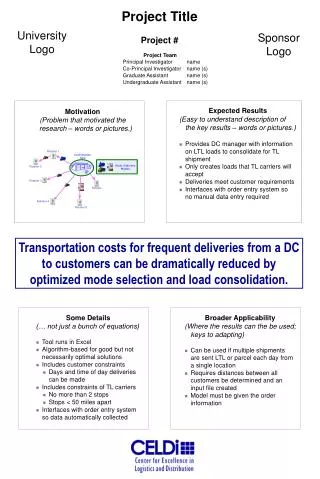
Introduction The MEMS vertical actuator described in this project consists of a center mass with a flat surface and is supported by simple flexures arranged symmetrically around the center mass. The device uses electrostatic comb structures to displace the flat surface.
Introduction Design constraints • Active Constraints • Minimum width of structure 5m • Minimum gap 5m • Thickness of the device 50m • Minimum diameter of center mass 200m • E =160 GPa • =2.33 gm/cm3 • Maximum DC input voltage = 30 V • Maximum die area, Ad 10mm2
Introduction Design Constraints • Inactive Constraints • Minimum displacement under max voltage: 20 m • Maximum DC acceleration survival, amax 2,000g • Maximum stress in suspension, max 1.6 GPa • Bandwidth of the device 1 kHz (resonance frequency)
Approach to Problem Observations • To fully maximize mass displacement, it is desirable to design a system with: • Minimum spring constant, k • By using a circular center mass, we can maximize the spring length/constant • Maximum amount of combs, N • Maximum overlapping comb distance, t
Approach to Problem From the force equation, We can easily observe that it is a function of N and t: F = f(N,t) With our area constraint active, there is a direct effect on one variable when the other is modified (as t is decreased, N can be increased and vice versa). Therefore, a compromise must be realized.
Approach to Problem t 200 m >> 5 m If t is designed too large, the combs may deflect. Conversely, if t is too small, the gaps between the combs become significant and limits the number of combs in our system. t 5m t>>5m
Approach to Problem • Used MATLAB to get a preliminary analysis of the design • Calculated k using Euler-Bernoulli Beam Theory (guided/fixed beam) • Optimized comb overlap, t • Calculated displacement • Built the model in Solidworks to verify that it satisfies all constraints • Used static and frequency analysis to check constraints
Approach to Problem Formation of final design • We initially set the thickness = 50 m as an active constraint, but that resulted either in deflections that are too small, or resonant frequencies that are too small. • Since actuating a maximum of 20 m requires the thickness to be 30 m (to allow for significant comb overlap when fully displaced), we changed the thickness constraint from active to inactive! • Then we redesigned the actuator with thickness = 30 m
Final Design Final Design of the Actuator
Final Design Final Design of the Substrate
Final Design Spring and Center mass Combs design
Final Design >20um Min DC displacement under Max DC voltage SATISFIED Deflection when 30V force applied
Final Design >150MPa <1.6GPa Max Stress in suspension Min Deformation stress (Part B) SATISFIED Max Stress when 30V force applied
Final Design Max Stress points
Final Design <1.6GPa Max DC acceleration survival SATISFIED Max Stress when 30V force applied
Final Design Resonant Frequencies for Modes I to V
Approach to Problem • Although the resonant frequency requirement fails in Mode I, the actuator is unlikely to exhibit this characteristic motion due to the forces applied. • Hence we can rule out Mode I.
Approach to Problem • More importantly, Mode II resonant frequency = 1244.2Hz > 1kHz. • Since the motion in Mode II is the most likely one, we can conclude that the actuator will fulfill the resonant frequency requirement stipulated. SATISFIED Resonant Frequency Requirement
Final Design FEM constraints • Displacement (satisfied) • Maximum acceleration shock test (satisfied) • Maximum Stress (satisfied) • Minimum Deformation Stress, Part B (satisfied) • Resonant Frequency (satisfied) Concerns • Base structure analysis: instability issues involving comb contact