Download
1 / 33
600 likes | 1.39k Views
Haptic Perception and Devices. David Johnson. What is Haptics?. adj . Of or relating to the sense of touch; tactile. [Greek haptikos , from haptesthai , to grasp, touch.] Haptics involves both proprioceptive and tactile senses, in concert with other senses.

E N D
Haptic Perception and Devices David Johnson
What is Haptics? • adj. Of or relating to the sense of touch; tactile. [Greek haptikos, from haptesthai, to grasp, touch.] • Haptics involves both proprioceptive and tactile senses, in concert with other senses. • adj. The science of applying touch (tactile) sensation and control to interaction with computer applications.
The Sense of Touch • Everyday Tasks • Dialing a phone • Playing a guitar or piano • Finding a light switch • Using a mouse • Touch is complex: tying a shoelace • Only bi-directional communication channel – both input & output
Why is Touch Important? • Touch-tone phone • Rich tactile cues • Can be done without looking • Effortless • PC calculator • No tactile cues • Only visual feedback • Painstaking
Tactile Perception • Provides information about our environment • e.g. hot, cold, smooth, rough • Provides feedback • e.g. when trying to lift an object, press buttons, etc. • Difficulties if no feedback?
Human skin Surface of average sized adult human: 1.8 m2 (1000 times that of retina) Weight: 5 kg Total number of axons: 1.1*106 Retina: 106 axons, Cochlea: 6*104 axons
Haptics and Vision Information Temporal capacity (bits/sec) acuity Fingertip 102 5 ms Ear 104 0.01 ms Eye 106-109 25 ms
Peripheral Pathways of Touch • Mechanoreceptors - pressure, texture, vibration • Proprioceptors - body position • Nocioceptors • Two pathways for pain • one fast pathway for sharp pain, • one slow pathway for dull pain • Thermoreceptors
Four Receptor Types a) Merkel Disks -- constant sources of stimulation over a small area, such as if you were carrying a pebble b) Meissner Corpuscles -- respond best to active touch involved in object exploration c) Ruffini Endings -- constant stimulation over a larger area - also detects skin stretch d) Pacinian Corpuscles -- extremely sensitive over a large receptive field -- blow gently on the palm of your hand
FA I SA I FA II SA II Receptors Receptive Field Meissner’s Merkel Pacinian Ruffini Corpuscle Cell Complex Corpuscle Ending Intensity and Time Course of Neural Signal (adaptation) Neural Spike train Stimulus Functional characteristics of Skin Mechanoreceptors:Receptive field size (I = small, II = large)and adaptation rate (FA = fast adapting, SA = slow adapting) Kandel et. al., 2000
Receptive Field The two-point threshold for any part of the body is determined by the size of the receptive fields and the extent of overlap
Proprioception • All muscles have nerve fibers which detect the amount the muscle is stretched • All joints have fibers which detect the relative position of each bone • Together these allow you to determine the position of every part of your body. [Green]
Proprioception Includes The Vestibular SenseOcular Motor [Green]
Haptic Interfaces • Fully duplex channel. You can both transmit and receive information simultaneously. • Requires very high refresh rates of approx.1000 Hz for realistic feel. • Requires very high spatial resolution. • On smooth glass surface, dot of height 1-3 µm and diameter of 550 µm can be detected by the fingertip (Johansson & LaMotte, 1983)
Tactile Technologies • Tactile information is produced by perturbing the skin • Pins or other mechanical vibrating elements - either alone or in an array, as in devices for Braille display • typically used for fingertip stimulation • Air jets blow to produce a disturbance • Cushions of air can be inflated or deflated to vary pressure on skin • Electrical stimulation - low levels of current provide a localized tingling sensation • Typically used in gloves, or for larger body areas
Laterotactile • Induce sensations of indent from lateral movement of skin
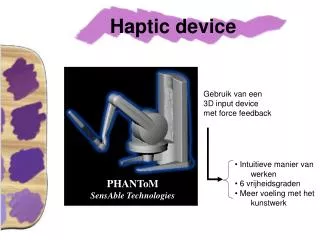
Force-Feedback Technologies • Kinesthetic (relating to the feeling of motion) info is produced by exerting mechanical forces • Haptic devices movie
CyberForce [Chang]
Magnetic Levitation • CMU • Very high fidelity • Small workspace • movie
Exoskeleton • 5DOF
Rutgers Hand Master • Pneumatic
Foot Haptics (locomotion interface) Omni-directional treadmill Foot-based interfaces Sarcos Biport Iwata’s GaitMaster
Whole-Body Haptics Sarcos Treadport II
CirculaFloor • Moving floor tiles • An example of “encountered haptics”
Discussion • Mechanical aspects are more daunting than for other VR technologies • Must handle gross positioning (proprioception) and fine detail (tactile) • Burgeoning area • 10 years ago, 20 papers a year • Now, 1000’s.