Download
1 / 29
310 likes | 561 Views
Tactile Perception and Haptic Interaction. Cecilia R. Aragon IEOR 170 UC Berkeley Spring 2006. Acknowledgments. Andrew Green, www.uwm.edu/~ag/teach_pdf/ lecturenotes/perception/12Touch.ppt Dean Chang, Immersion Corp., www.immersion.com

E N D
Tactile PerceptionandHaptic Interaction Cecilia R. Aragon IEOR 170 UC Berkeley Spring 2006
Acknowledgments • Andrew Green, www.uwm.edu/~ag/teach_pdf/ lecturenotes/perception/12Touch.ppt • Dean Chang, Immersion Corp., www.immersion.com • Stephen Wall, http://www.dcs.gla.ac.uk/~pdg/teaching/demms4/notes/Haptics.pdf IEOR 170
The Sense of Touch • Everyday Tasks • Dialing a phone • Playing a guitar or piano • Finding a light switch • Feeling your pulse • Touch is complex: tying a shoelace • Only bi-directional communication channel – both input & output IEOR 170
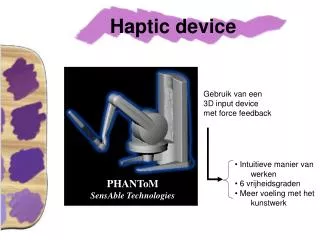
Why is Touch Important? • Touch-tone phone • Rich tactile cues • Can be done without looking • Effortless • PC calculator • No tactile cues • Only visual feedback • Painstaking [Chang] IEOR 170
Tactile Perception • Provides information about our environment • e.g. hot, cold, smooth, rough • Provides feedback • e.g. when trying to lift an object, press buttons, etc. • Examples • Difficulties if no feedback? IEOR 170
The Physiology of Touch Primary Sensory Cortex • Work together to inform us about pressure, texture, stretch, motion, vibration Mechanoreceptors (peripheral) (cortical) [Chang] IEOR 170
Peripheral Pathways of Touch • Mechanoreceptors - pressure, texture, vibration • Proprioceptors - body position • Two pathways for pain (both of which are independent from other tactile or proprioceptive pathways) – • one fast pathway for sharp pain, • one slow pathway for dull pain [Green] IEOR 170
Four Receptor Types a) Merkel Disks -- constant sources of stimulation over a small area, such as if you were carrying a pebble b) Meissner Corpuscles -- respond best to active touch involved in object exploration c) Ruffini Endings -- constant stimulation over a larger area - also detects skin stretch d) Pacinian Corpuscles -- extremely sensitive over a large receptive field -- blow gently on the palm of your hand [Green] IEOR 170
Cross Section of the Skin [Green] IEOR 170
Receptive Field • Mechanoreceptors detect skin deformations • Tactile acuity is determined by how close the mechanoreceptors are to each other and by the size of the receptive field [Green] IEOR 170
Receptive Field [Green] IEOR 170
Receptive Field The two-point threshold for any part of the body is determined by the size of the receptive fields and the extent of overlap IEOR 170
Sensation of Touch (Cortex) • Adjacent portions of skin surface tend to be represented by adjacent portions of cortex • Cortical magnification for lips, nose and fingers [Green] IEOR 170
Cortical Pathways of Touch [Green] IEOR 170
Cortical Magnification • The receptive fields and cortical representations give more acuity to fingers, mouth, nose and tongue [Green] IEOR 170
Cortical Plasticity for Touch [Green] IEOR 170
Proprioception • All muscles have nerve fibers which detect the amount the muscle is stretched • All joints have fibers which detect the relative position of each bone • Together these allow you to determine the position of every part of your body. [Green] IEOR 170
Proprioception Includes The Vestibular SenseOcular Motor [Green] IEOR 170
Haptics IEOR 170
What is Haptics? • adj. Of or relating to the sense of touch; tactile. [Greek haptikos, from haptesthai, to grasp, touch.] • Haptics involves both proprioceptive and tactile senses, in concert with other senses. • adj. The science of applying touch (tactile) sensation and control to interaction with computer applications. IEOR 170
Haptic Interfaces • Fully duplex channel. You can both transmit and receive information simultaneously. • Requires very high refresh rates of approx.1000 Hz for realistic feel. • Requires very high spatial resolution. • Touch is a complex modality consisting of several distinct sensory channels. [Wall] IEOR 170
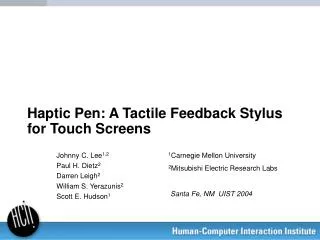
Tactile Technologies • Tactile information is produced by perturbing the skin • Pins or other mechanical vibrating elements - either alone or in an array, as in devices for Braille display • typically used for fingertip stimulation • Air jets blow to produce a disturbance • Cushions of air can be inflated or deflated to vary pressure on skin • Electrical stimulation - low levels of current provide a localized tingling sensation • Typically used in gloves, or for larger body areas [Wall] IEOR 170
Force-Feedback Technologies • Kinesthetic (relating to the feeling of motion) info is produced by exerting mechanical forces • Technologies are easier to produce than tactile • High-end devices • Algorithms for force feedback - the KX model to produce barriers • force exerted = K * X • where X is the distance beyond thebarrier, K a stiffness constant [Wall] IEOR 170
Interaction of Touch & Vision [Green] IEOR 170
The Haptic Technology Spectrum • Mass/Weight • Stiffness/Detents • Viscosity/Damping • Roughness/Texture • Pulses • Waveforms • Vibrations • Simultaneous Compound Effects [Chang] IEOR 170
Haptics in Medical Simulation • Simulators before Haptics • Fruit • Animals • Cadavers • No Touch • Trends Towards More Reliance on Touch • Laparoscopy • Endoscopy [Chang] IEOR 170
Haptics in Medicine • Photorealistic Graphics • Life-like Sounds • Simulated Touch • & Emotion [Chang] IEOR 170
Haptics in Laparoscopy [Chang] IEOR 170
Haptics in Design & Simulation [Chang] IEOR 170