Download
1 / 237
2.39k likes | 2.59k Views
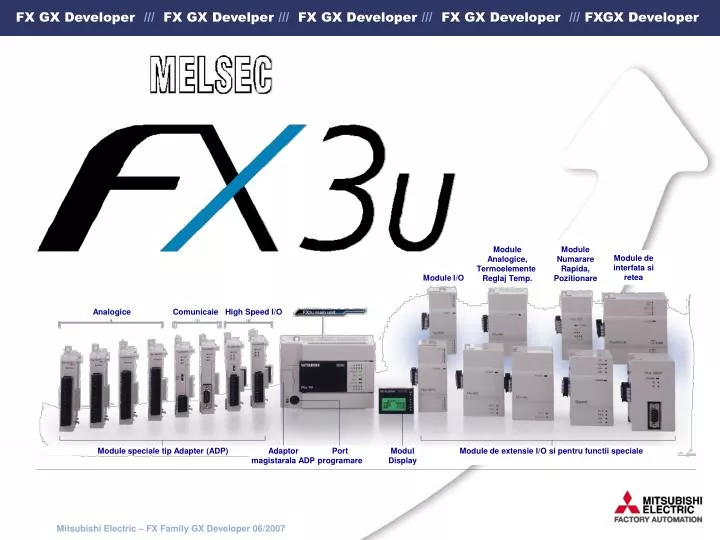
Module Analogice, Termoelemente, Reglaj Temp. Module Numarare Rapida, Pozitionare. Module de interfata si retea. Module I/O. Analogice. Comunicaie. High Speed I/O. Module speciale tip Adapter (ADP). Adaptor magistarala ADP. Port programare. Modul Display.

E N D
Module Analogice, Termoelemente, Reglaj Temp. Module Numarare Rapida, Pozitionare Module de interfata si retea Module I/O Analogice Comunicaie High Speed I/O Module speciale tip Adapter (ADP) Adaptor magistarala ADP Port programare Modul Display Module de extensie I/O si pentru functii speciale
Cuprins • Prezentare generala / cuprins • Hardware • 2.1 Avantaje ale sistemelor cu PLC • 2.1.1 Logica programata cu PLC / logica de control cablata • 2.1.2 Limbajul de programare al PLC-urilor • 2.1.3 Terminalele de operare HMI • 2.2 Ce este un PLC • 2.3 Procesarea programelor PLC • 2.4 Familia MELSEC FX • 2.5 Criterii de configurare
Cuprins • 2.6. Structura automatelor programabile • 2.6.1 Circuitele de Intrari / Iesiri • 2.6.2 Unitati de baza MELSEC FX1S • 2.6.3 Unitati de baza MELSEC FX1N • 2.6.4 Unitati de baza MELSEC FX2N • 2.6.5 Unitati de baza MELSEC FX2NC • 2.6.6 Unitati de baza MELSEC FX3U • 2.7 Scheme de cablare • 2.7.1 Sursa alimentare • 2.7.2 Intrari • 2.7.3 Iesiri
Cuprins • 2.8 Extinderea numarului de Intrari / Iesiri • 2.8.1 Module de extensie tip board • 2.8.2 Unitati de extensie compacte • 2.8.2 Unitati de extensie modulare • 2.9 Module pentru functii speciale • 2.9.1 Module analogice • 2.9.2 Module si adaptoare numarare rapida • 2.9.3 Module de pozitionare • 2.9.4 Module de retea ETHERNET • 2.9.5 Module de retea Profibus/DP • 2.9.6 Module de retea CC-Link
Cuprins 2.9.7 Module de retea DeviceNet 2.9.8 Module de retea CANopen 2.9.9 Module de retea AS-Interface 2.9.10 Adaptoare si module de interfata 2.9.11 Adaptoare de magistrala 2.9.12 Placi setpoint cu semireglabili 2.10 Configrarea sistemelor FX 2.10.1 Conectarea modulelor tip adapter (numai pt. FX3U) 2.10.2 Reguli de baza pentru configurarea de sistem 2.10.3 Matricea de calcul sursa
Cuprins • 2.11 Alocarea Intrarilor/ Iesirilor • 2.11.1 Modalitatea alocarii intrarilor / iesirilor digitale • 2.11.2 Adrese module functii speciale • 3. GX Developer • 3.1 Avantaje alepachetului GX-Developer • 3.2 Instalarea mediului de programare GX-Developer • 4. Crearea unui proiect • 4.1 Exemple programare PLC (ExProg1) • 4.1.1 Numarul de linie • 4.1.2 Principiul de operare
Cuprins 4.2 Procedura de incepere a unui program (setari initiale) 4.3 Elemente de editare Ladder Diagram 4.4 Structura de proiect (Project Data List) 4.5 Activarea / dezactivarea structurii de proiect 4.6 Schimbarea atributelor de culoare (Optional) 4.7 Editarea in modul Ladder Diagram (Ex_Prog1) 4.8 Conversia programului in modul lista instructiuni 4.9 Salvarea proiectului 5. Editarea programului in modul Instruction List (lista instructiuni) 5.1 Modul de editare Instruction List (Ex_Prog1) 5.2 Explicatii mod editare Instruction List
Cuprins 6. Functii de cautare 6.1 Cautarea pasului de program 6.2 Cautarea device-urilor 6.3 Cautarea unei instructiuni 6.4 Lista de aparitii in program a unui device 6.5 Lista de device-uri utilizate 7. Copierea proiectelor 7.1 Copierea proiectului Ex_Prog1 8. Modificarea programului in modul de editare Ladder Diagram 8.1 Modificarea proiectului Ex_Prog2 8.2 Inserarea unui nou contact
Cuprins 8.3 Schimbarea tipului sau adresei unui device 8.4 Inserarea unei ramificatii 8.5 Inserarea unei secvente noi de program 9. Functii de stergere 9.1 Consideratii generale 9.2 Stergerea unui contact 9.3 Stergerea unei ramificatii 9.4 Stergerea unei singure linii de program 9.5 Stergerea mai multor linii de program 10. Intocmirea documentatiei 10.1 Exemplu program: Ex_Prog4
Cuprins 10.2 Utilizarea in program a comentariilor 10.3 Comentariile pentru device-uri 10.4 Accesarea comentariilor din structura de proiect 10.5 Formatul comentariilor 10.6 Comentariile de bloc de program 11. Alocarea Intrarilor/Iesirilor 11.1 Verificarea domeniului de Intrari / Iesiri 12. Incarcarea unui proiect in PLC 12.1 Selectarea si setarea canalului de comunicatie 12.1.1 Selectarea canalului de comunicatie 12.2 Stergerea memoriei PLC
Cuprins • 12.3 Inscrierea programului in PLC • 12.4 Reducerea numarului de pasi transferati in PLC • 13. Rularea programului • 14. Functii de monitorizare • 14.1 Monitorizarea programului Ex_Prog4 • 14.2 Ecranul de monitorizare Ex_Prog4 • 14.3 Fereastra de monitorizare device-uri (Entry Data Monitoring) • 14.4 Monitorizarea simultana a programului si datelor • 14.5 Functia Device Test • Verificarea programului • 15.1 Verificarea exemplelor de program
Cuprins • 16. Transferul programului din PLC - Upload • 16.1 Exemplu transfer program din PLC - Upload • 17. Modul de editare (SFC) Sequential Function Chart / succesiune de stari • 17.1 Elementele unui program SFC • 17.2 Reguli de comutare a starilor • 17.3 Editarea proiectului • 17.4 Transferul proiectului • 17.5 Monitorizarea proiectului • 18. Contoare • 18.1 Exemplu program - Count1 • 18.2 Exemplu program - Count2
Cuprins • 18.2.1 Count2 • 18.2.2 Modificarea programului Count2 • 19. Programarea On Line • 19.1 Modificarea On Line a programului Count2 • 20. Instructiunile FROM / TO • 20.1 Schimbul de date cu modulele de functii speciale • 20.2 Instructiuni pentru accesul la buffer-ul de memorie • 20.2.1 Citire Buffer Memorie (FROM) • 20.2.2 Scriere Buffer Memorie (TO) • 21. Bucle FOR - NEXT • 21.1 Procesarea buclelor FOR – NEXT
Cuprins • 21.1.1 Exemplu de program • 21.2 Bucle FOR-NEXT imbricate • 21.3 Operanzi pentru instructiunea FOR • 22. Comunicatia Ethernet • 22.1 Parametri de configurare ai modulului Ethernet FX3U • 22.1.1 Configurarea PLC • 22.2 Configurarea PC-ului pentru comunicatia Ethernet • 22.3 Configurarea GX Developer pentru accesarea PLC-ului prin Ethernet • 22.4 Setarea terminalului HMI • 22.5 Comunicatia prin MX Component
2. Hardware 2.1 Avantaje ale sistemelor cu PLC • Usor de programat si reprogramat in instalatie, in functie de cerintele ce apar in proces. • Simplu de intretinut si reparat, utilizand placi sau module ‘plug-in’. • Capabil sa reziste conditiilor grele de mediu, mecanice si electrice ce se intilnesc in mediile industriale. • Mult mai compact decat schemele echivalente cu elemente discrete. • Mai economic comparativ cu sistemele in logica cablata cu elemente discrete.
2.1.1 Comaparatii intre logica programata cu PLC si logica de control cablata
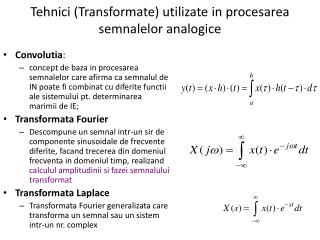
2.1.2 Limbajul de programare al PLC-urilor Logica Ladder Automatele programabile au fost concepute pentru a fi intretinute de tehnicieni si electricieni. Din acest motiv a fost dezvoltat limbajul de programare Ladder, limbaj ce se bazeaza pe simboluri de tip relee si contacte, cu care personalul electric este foarte familiarizat. Primele medii de programare permiteau numai o dezvoltare simpla a programelor fara sa ofere posibilitatea crearii documentatiei de program la nivelul necesar pentru urmarirea programelor complexe. Acest neajuns a fost imbunatatit in mod semnificativ prin pachetul de programare si configurare GX Developer (descris in detaliu in acest curs). Dupa introducerea in 1998 a standardului IEC 61131-3 ce reglementeaza programarea PLC-urilor, Mitsubishi Electric a dezvoltat si o a doua linie de software - GX-IEC Developer - ce asigura compatibilitatea cu acest standard.
2.1.3 Terminalele de operare HMI Utilizarea terminalelor HMI in sistemele de control cu PLC a devenit in zilele noastre un lucru din ce in ce mai obisnuit pentru asigurarea interfetei de operare.
2.2 Ce este un PLC Spre deosebire de sistemele conventionale de control bazate pe logica cablata, a caror functiuni sunt determinate de conexiunile fizice intre componente, functiunile automatului programabil sunt definite prin program. Chiar daca legatura automatului programabil cu celelalte componente dintr-un sistem se realizeaza tot prin cabluri, continutul programului poate fi schimbat oricand si poate fi adaptat la diferite sarcini de control, fara a fi necesara interventia la nivelul hardware. Automatul programabil citeste semnalele de intrare, le proceseaza si transmite comenzile catre proces. Modul de lucru al automatului programabil cuprinde trei secvente: procesarea intrarilor (semnalele de intrare sunt citite, procesate si plasate intr-un buffer de memorie denumit imagine a intrarilor) procesarea programului (pe baza datelor de intrare programul este procesat instructiune cu instructiune si datele de iesire sunt plasate intr-un buffer de memorie denumit imagine a iesirilor) procesarea iesirilor (datele de iesire sunt transferate din bufferul imagine a iesirilor la iesirile fizice)
2.3 Cum se proceseaza programul PLC Procesarea intrarilor Programul PLC este procesat cu valorile din bufferele de imagine a intrarilor si iesirilor, si nu cu valorile instantanee ale intrarilor. Iesirile fizice sunt reactualizate in secventa de procesare a iesirilor la sfarsit de program.
2.3 Cum se proceseaza programul PLC Programul este procesat de sus in jos, de la pasul 0 la ultimul pas al programului, in ordinea in care instructiunile sunt programate. Rezultatele procesarii unei anumite secvente de program sunt memorate si utilizate pe durata ciclului curent de scanare. Procesare program Stocare rezultat Iesire Utilizare rezultat stocat
2.3 Cum se proceseaza programul PLC Procesarea iesirilor Rezultatele operatiilor logice relevante pentru iesiri sunt stocate in bufferul imagine a iesirilor. Informatia din bufferul de imagine a iesirilor ramane nemodificata pana la urmatoarea scriere. La sfarsit de program valorile sunt transmise catre iesirile fizice, dupa care ciclul este reluat. Diferente intre modul de procesare al unui PLC si sistemele de control realizate in logica cablata. In cazul logicii cablate efectul este simultan cauzei (“procesare“ paralela). Fiecare modificare a starii semnalului de intrare determina o modificare instantanee in starea semnalului de la iesire. In cazul unui PLC efectul apare la urmatorul ciclu de procesare de dupa cauza (dupa modificarea intrarii). In zilele noastre acest dezavantaj este minimizat prin cresterea vitezei de procesare a unitatii centrale si implicit prin reducerea duratei de procesare a programului. Durata unui ciclu de scanare program depinde in principal de numarul si tipul instructiunilor executate.
2.4 Familia MELSEC FX MELSEC inseamna MITSUBISHI ELECTRIC SEQUENCER. Automatele programabile din seria MELSEC FX ofera solutii economice si flexibile pentru aplicatii de complexitate mica si medie in domeniul 10 – 256 puncte de intrari / iesiri (384 in cazul FX3U), pentru aplicatii atat in industrie cit si sisteme building management. Unitatile centrale FX1N, FX2N si FX3U sunt extensibile cu module de extensie digitale compacte si modulare, cu module de functii speciale, cu module de interfata si retea, facandu-le potrivite in aceeasi masura si pentru aplicatii complexe, ce necesita functii speciale. Toate aceste serii fac parte din familia mai larga FX si asigura un nivel ridicat de compatibilitate.
2.5 Alegerea configuratiei optime Cateva considerente ce trebuie avute in vedere la configurarea unui sistem: Sursa de alimentare surse disponibile: 24 Vcc sau 100 – 240 Vca Intrari / Iesiri – Nr. semnale (limitatori, butoane, senzori, etc.) – Inventarierea intrarile dupa tipul semnalelor (sink, source, contact) si dupa functia indeplinita (intrari normale, high speed, intrerupere hardware externa, etc. – Inventariere iesiri dupa marimea sarcinii, tensiune de comanda, normale sau high speed, etc. Module functii speciale – Numar maxim de module suportate de sistem – Necesitatea sursei de alimentare externa
2.6 Structura automatelor programabile Toate automatele din seria FX se bazeaza pe acelasi concept. 2.6.1 Circuitele de intrare/iesire Intrarile sunt izolate galvanic fata de celelalte circuite ale automatului prin optocuploare. Iesirile sunt disponibile pe releu sau tranzistor. Iesirile pe tranzistor sunt de asemenea izolate galvanic fata de restul circuitelor PLC prin optocuploare. Intrarile sunt in 24 Vcc si pot fi selectate global in logica sink sau source. Ca sursa pentru intrari se poate utiliza sursa oferita de unitatea de baza PLC. Sarcina maxima pentru iesirile pe releu este de 2A sarcina rezistiva la 250Vca si 0.5A sarcina rezistiva pentru 24 Vcc.
2.7 Conexiuni 2.7.1 Sursa de alimentare Specificatii sursa alimentare Impamantare Unitatea de baza ca si celelalte module prevazute cu terminal de impamantare trebuie legate la pamant. Rezistenta de impamantare trebuie sa fie sub 100 Ω. Punctul de impamantare trebuie sa fie cat mai aproape de aparat iar cablul de impamantare cat mai scurt posibil. Se recomanda asigurarea impamantarii independete pentru fiecare componenta din configuratie.
2.7.2 Conectarea intrarilor Conectarea semnalelor de tip sink si source Unitatile de baza din seria FX pot fi utilizate atat in logica sink cat si in logica source. Selectarea se face global, in functie de potentialul la care se conecteaza terminalul de selectie "S/S". modul de conectare pentru logica sink modul de conectare pentru logica source
2.7.2 Conectarea intrarilor Exemplu conectare senzori cu iesiri de tip tranzistor npn sau pnp Unitati de baza cu alimentare in ca
2.7.3 Conectarea iesirilor Conectarea iesirilor pe releu si tranzistor in logica sink / source Iesire pe releu Iesire pe tranzistor (source) Iesire pe tranzistor (sink)
2.8 Extinderea numarului de intrari / iesiri Modalitatile de extindere a numarului de intrari / iesiri disponibile pe unitatile de baza din seria MELSEC FX sunt urmatoarele: 2.8.1 Unitati de extensie tip board : se poate utiliza cu unitati de baza din aceasta serie. : nu se poate utiliza cu aceaste serii.
2.8.2 Unitati de extensie compacte Unitatile de extensie compacte au propria sursa. Sursa de 24 Vcc integrata poate fi utilizata pentru alimentarea device-urilor externe. Aceste unitati sunt disponibile in variante cu alimentare la 220 Vca sau 24Vcc, cu iesiri pe releu sau iesiri pe tranzistor, logica sink sau logica source. : Unitatea de extensie poate fi utilizata cu unitati de baza din aceasta serie : Unitatea de extensie nu poate fi utilizata cu unitati de baza din aceasta serie
2.8.3 Unitati de extensie modulare Unitatile de extensie modulare nu sunt echipate cu sursa interna si au gabarit compact. Unitatile de extensie modulare FX2N sunt disponibile cu 8 sau 16 intrari / iesiri. Modulele de iesiri sunt disponibile in variantele pe releu sau tranzistor, logica sink sau logica source.
2.9 Module pentru functii speciale Module tip board Modulele de tip board se monteaza direct pe unitatile de baza FX1S si FX1N si nu ocupa spatiu suplimentar. In cazul modulului de intrari analogice de tip board FX1N-2AD-BD, intrarile analogice sunt citite de sistemul de operare al automatului si scrise direct in registrii speciali D8112 si D8113, fara a fi necesara scrierea unei secvente de program in acest sens. Similar, valoarea de iesire pentru modulul cu o iesire analogica FX1N-1DA-BD se scire de catre program in registrul special D8114, conversia si transmiterea catre iesire fiind facuta de catre sistemul de operare.
2.9 Module pentru functii speciale Module Speciale de tip Adapter Modulele speciale de tip adapter pot fi conectate numai in partea stanga a unitatilor de baza din seria FX3U. Se pot conecta pana la maximum 10 astfel de module. Modulele speciale de tip adapter nu ocupa puncte de intrari / iesiri suplimentare in spatiul de adresare al unitatii de baza. Acestea comunica cu unitatea de baza prin acces direct la memorie, prin relee si registri speciali. Din aceast motiv nu sunt implementate instructiuni speciale pentru comunicarea cu aceste module.
2.9 Module pentru functii speciale Module standard pentru functii speciale (cu conectare in partea dreapta) In configuratiile MELSEC FX se pot utiliza pana la opt module pentru functii speciale cu conectare in partea dreapta. Gama de module speciale include, pe langa module analogice, module pentru termoelemente, module de reglaj temperatura, module de comunicatie, module de pozitionare, module de numarare rapida. Fiecare modul pentru functii speciale ocupa opt puncte de intrare/iesire in spatiul de adresabilitate al unitatii de baza. Transferul de date intre unitatea de baza si modulele de functii speciale se realizeaza prin intermediul bufferelor de memorie ale acestor module, cu instructiunile FROM si TO.
2.9.1 Module analogice Fara module suplimentare unitatile de baza din familia MELSEC FX pot procesa numai semnale de intrari / iesiri digitale. In cazul in care aplicatia necesita si procesarea de semnale de intrari / iesiri analogice, in configuratie trebuie incluse si module analogice.
2.9.1 Module analogice * Modulul special FX2N-8AD poate masura tensiune, curent si temperatura.
2.9.1 Module analogice * Modulul special FX2N-8AD poate masura tensiune, curent si temperatura. Extensie tip board, extensie tip adapter sau modul functii speciale ce poate fi utilizat cu unitatea de baza sau unitati de extensie compacte din aceasta serie. Extensie tip board, extensie tip adapter sau modul functii speciale ce nu poate fi utilizat cu unitatea de baza sau unitati de extensie compacte din aceasta serie.
2.9.2 Module si adaptoare pentru numarare rapida FX2N-1HC In plus fata de canalele de numarare rapida ce se pot implementa direct pe unitatile de baza FX, modulul FX2N-1HC ofera utilizatorului posibilitate implementarii unor canale de numarare rapida suplimentare. Posibilitatile de numarare includ contorizarea a una sau dou faze, cu frecvente de pana la 50 kHz, pe 16 sau 32 bit. Doua iesiri digitale pe tranzistor pentru functii de comparare, configurabile separat. In acest fel se pot implementa intr-un mod economic taskuri simple de pozitionare. In plus, FX2N-1HC poate fi utilizat ca si counter circular.
2.9.2 Module si adaptoare pentru numarare rapida FX3U-4HSX-ADP si FX3U-2HSY-ADP Aceste adaptoare permit implementarea fara accesorii suplimentare a aplicatiilor de pozitionare. FX3U-4HSX-ADP ofera patru intrari de numarare rapida pana la 200 kHz, in timp ce FX3U-2HSY-ADP ofera doua canale de iesire in frecventa pana la 200 kHz.
2.9.2 Module si adaptoare pentru numarare rapida Caracteristici de baza si compatibilitati de utilizare se poate utiliza cu unitati de baza din aceasta serie nu se poate utiliza cu unitati de baza din aceasta serie.
2.9.3 Module de pozitionare FX2N-1PG-E, FX2N-10PG Modulele de pozitionare FX2N-1PG-E si FX2N-10PG sunt solutii economice pentru aplicatii de control al unei axe. Se poate utiliza cu actionari servo sau motoare pas cu pas. Modul de comanda este digitala, cu trenuri de impulsuri. Ambele module se pot utiliza cu unitatile de baza FX2N si FX3U. Parametrii si datele de pozitionare se transmit direct prin programul de automat programabil, fara a mai fi necesare aceesorii sau medii separate de configurare. Frecventa maxima si tipul iesirii este de 100 kHz, open colector pentru FX2N-1PG-E, respectiv 1MHz, iesire diferentiala in cazul FX2N-10PG. Ambele module permit functii pentru comanda manuala sau automata a deplasarii.
2.9.3 Module de pozitionare FX3U-20SSC-H Modulul SSCNET III FX3U-20SSC-H se poate utiliza numai cu unitati de baza FX3U si permite solutii economice pentru aplicatii de mare viteza si precizie. Tehnologia plug-and-play SSCNET pe cablu optic reduce timpul necesar pentru setare, asigurand in acelasi timp posibilitatea de montare la distanta mai mare a actionarilor servo. Parametrii servo si informatiile de pozitie necesare pentru FX3U-20SSC-H se seteaza usor prin intermediul conexiunii cu unitatea de baza FX3U din mediul de configurare FX Configurator-FP ce ruleaza pe PC sub Windows.