Download
1 / 15
160 likes | 350 Views
GOME-202-2 slit function analysis PM2 Part 1: Retrieval Scheme R. Siddans, B. Latter, B. Kerridge RAL Remote Sensing Group 26 th June 2012 RAL. GOME-2 FM202-2: PM2 Slit function analysis. Overview of slit-function fitting method New results for FM202-2 (WP2100)

E N D
GOME-202-2 slit function analysisPM2Part 1: Retrieval SchemeR. Siddans, B. Latter, B. KerridgeRAL Remote Sensing Group26th June 2012RAL
GOME-2 FM202-2: PM2Slit function analysis • Overview of slit-function fitting method • New results for FM202-2 (WP2100) • - use of new angular parameters from TNO • - modification of source line shape to match commissioning measurements • Comparisons of results: • - FM202-2 to FM202-1 • - FM202-2 1mm to FM202-2 0.5mm • Error analysis for FM202-2 • Discussion re next steps, date of next meeting (FP) • AVHRR/GOME-2 co-location, spatial aliasing and geo-referencing (Ruediger Lang)
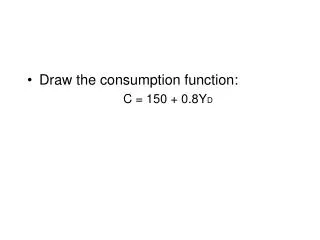
stimulus line width / nm Wavelength / nm SFS Measurements
FM3 1.0mm slit FM2 0.5mm (now 76-77.3) FM2 1.0mm Wavelength / nm
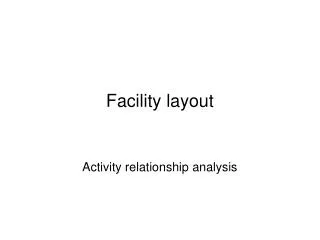
Detailed line-shape • Close to triangular • Presence of wings at few % level Wavelength / nm SFS Measurements (2004) • Spectral ghosts & straylight • Broad-band stray-light • Rowland ghosts • symmetric about peak • Additional “straylight” ghost for FM3 • Limited knowledge of • Wavelength calibration • Source intensity
SFS Analysis • Problem: • deconvolution from a signal which also includes • the spectral shape of the stimulus • radiometric response of the instrument • random and systematic errors (e.g. straylight). • stimulus width is not negligible: • solution requires a priori knowledge • Optimal estimation (OE) used here: • Physical model of measurement system • Quantitative incorporation of a priori knowledge • Not necessary to define ad-hoc functional slit-shapes • Quantitative description of errors
Analysis Procedure • Optimal Estimation Retrieval • Uses physical “forward” model (FM) of the SFS measurement process • Optimise model parameters including slit functions to get consistent fit to measurements • Measurement vector: • GOME-2 signals (dark-corrected BU/s) within interval +/- 0.3x order spacing of a fringe pk • State-vector: • Slit-function • Piece-wise linear representation at 0.01 or 0.02nm spacing • Stray-light • 2nd order polynomial • Amplitudes of Rowland ghosts • Spectrally-integrated order intensity at each Echelle angle • Resulting Key-data: • Retrievals for “fully-sampled” pixels (including estimated errors) • Linear interpolation to other pixels
Constraints on Retrieval • Optical point spread function • Smoothness of slit-function for given pixel “Spot” dimension: 0.16nm in Ch 1&2 0.32nm in Ch 3&4 • Slit-function areas normalised to 1 • Slit-function values at any given input wavelength sum to 1 • input delta-fn is distributed across detector pixels but GOME conserves total intensity (after radiometric calibration) 4. Tikhonov smoothing (weak) from pixel to pixel
Wavelength calibration • Assume SFS wavelength calibration is highly accurate • based on grating theory with angles optimised by TPD scheme • Slit-function wavelength grid defined relative to nominal wavelength of each pixel according to the SLS key-data wavelength calibration • SLS -calibration has known deficiencies where lines sparse(NB Huggins bands) • Retrieval scheme will offset slit-function centre-of-mass as necessary • will be offset where SLS calibration erroneous • No attempt is made to re-centre slit-functions before delivery • off-centre slit-functions provide implicit correction for SLS wavelength calibration errors when used to simulate L1 spectra by convolving high-resolution reference spectra.
Normalisation constraint • By definition slit-functions should be normalised after application of the GOME-2 radiance response function. • Errors in prior knowledge of fringe intensity and GOME-2 radiance response mean slit-functions should not be assumed normalised without fitting source intensity • Slit-functions constrained to be normalised within “a priori” error of 0.01% • Fringe intensity retrieved for given order at every echelle step • No a priori constraint • First guess from TPD derived value
Retrieval of fringe intensity • Further constraint is required to give stable solution • Need to assume intensity in the fringe (at each echelle step) = total intensity recorded by all the detector pixels (after radiometric calibration and removal of straylight) • I.e. by adding response in all detector pixels, GOME-2 behaves as perfect radiometer, and conserves total input energy (after accounting for radiance response): P = i=1,NRi x Ci x i radiance response (W/cm2/nm/sr)/(Counts/s) detectorread-outCounts/s Fringe intensityW/cm2/sr sum overdetector pixels detector pixel spectral widthnm
Example early retrieval: Diagnosis of Ghost features Measurements Fit residuals (measurement – model) Measurements (colour scale to reveal structure away from main peak) Fitted straylight SFS power: Fitted (solid) First guess (dashed) Retrieved slit-functions Fully sampled pixels Partially sampled pixels Total reponse (radiometer constraint)
Treatment of ghosts • Positions of Rowland ghosts modelled by equation: i im • with li=0.205,0.29,0.47 based on analysis of data by TPD • Intensity of each ghost line is retrieved (assuming symmetric about peak) • Choose to always fit measurements in detector pixels with +/- 0.3 fractional order of main peak • Over this range, after fitting ghosts, remaining straylight linear with wavelength
Linear mapping • Contribution functionDy= ( Sa + KtSy-1K )-1KtSy-1 • Linear mapping of an error spectrum:( x’-x ) = Dy (y’-y) • Linear mapping of covariance in RTM or IM parameter:Sx:y = DySy:bDyt, butSy:b= KbSbKbt • Propagate errors onto slit function retrieval then O3 profile x = State vector of (retrieved parameters) y = Measurement vector (b = error considered) K = Weighting function matrix (Kij = yj/xi) Sa = a priori covariance Sx = Estimate covariance of state after retrieval