Download
1 / 16
160 likes | 276 Views
Vers une conception de systèmes multi-agents orientée communications et mobilité. Nejla Amara-Hachmi Gilles Klein Amal El Fallah-Seghrouchni. L I P N. JFIADSMA’02 Lille. Vers une conception de SMA orientée communications et mobilité. Deux questions

E N D
Vers une conception de systèmes multi-agents orientée communications et mobilité Nejla Amara-Hachmi Gilles Klein Amal El Fallah-Seghrouchni L I P N JFIADSMA’02 Lille
Vers une conception de SMAorientée communications et mobilité • Deux questions • Faut-il prendre en charge les communications au niveau de la conception du SMA ? • La mobilité peut-elle aider à l’équilibrage de charge ?
Contexte • Mise en œuvre des agents est une tâche complexe • Recyclage du code • Synchronisation • Distribution • Répartition de charge a priori Construction récursive Représentation formelle adéquate • Réseaux de Petri Récursifs • RPR et RPCR Redistribution dynamique des charges Agents mobiles
Utilisation des RPR dans l’analyse et la conception • Utilisation des RPR pendant l’analyse • Méthode récursive • Spécification formelle des ressources (paramètres des méthodes) • Gestion fine du parallélisme et de la synchronisation • Construction des agents à partir des RPR résultants de l’analyse • Adaptation de la représentation des communications pour conserver les avantages précédents
Exemple DOGS • Système de diagnostic (mono-agent) • Réalisé par l’équipe de P. Taillibert chez THALES • Répartition de DOGS
Parallélisation Synchronisation Choix Séquence Indifférent S’il y a moins de points d’accès que de tâches alors l’ensemble doit être sérialisé sinon voir plus bas La séquence est attribuée à un seul agent Chaque tâche est attribuée à un agent différent Ressources Dépend du poids des informations nécessaires Chaque tâche est allouée à un agent différent ou l’une des pseudo-séquences est allouée à un agent Données Distribution des tâches entre agentsen fonction des relations entre elles
Placement des agents • Problème de placement des agents dans un réseau : • défaillance d’un composant du réseau, • variation • du nombre d’agents en exécution, • du volume des communications, ... • Redistribution dynamique des agents • « éviter » les nœuds défaillants • minimiser les interactions coûteuses • garder pour chaque agent la puissance de calcul nécessaire à son fonctionnement, • rapprocher les agents qui communiquent fréquemment.
Principe : agents mobiles • Migration des agents distribution dynamique • Un bon compromis • coût des communications, • puissance de calcul • performances du réseau Nécessité de considérer l’état du système pour prendre la décision de migration : quand et vers où? niveau « agent » ? Décision niveau « central » ? niveau intermédiaire
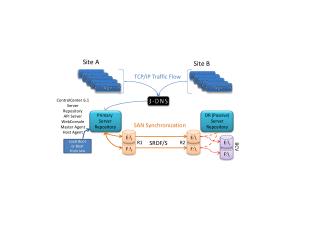
Figure 5.Architecture de plate-forme conforme à MASIF [Crystaliz 1997] Cadre architectural pour la migration Architecture d’une plate-forme d’agents mobiles conforme à MASIF de l’OMG
Figure 6.Prise de décision de migration Décision de migration Agency Manager : observer le fonctionnement des agents résidants dans l'agence.
Décision de migration (suite) Scénario 1 • Chaque agent conserve une trace locale de ses communications repère les plus fréquentes et les plus coûteuses [Mazouzi, 2002] • L’agent contacte le manager de son agence et lui émet son souhait de se rapprocher de l'agent distant avec qui il échange les communications les plus importantes. • Le manager contacte le manager de l'agence où « se trouve » l'autre agent et négocie avec lui le meilleur scénario pour rapprocher les deux agents. • Atteinte de consensus entre managers [Vauvert, 2001]
Décision de migration (suite) Scénario 2 • Périodiquement, les agents envoient la trace locale de leurs communications aux managers de leurs agences qui peuvent ainsi former une trace globale des communications de l'agence [Mazouzi, 2001] • Les managers analysent ces communications et négocient entre eux pour décider quels agents déplacer, • Atteinte de consensus entre managers [Vauvert, 2001]
Conclusion et perspectives • Deux débuts de réponse • Faut-il prendre en charge les communications au niveau de la conception du SMA ? • L’allocation de tâches aux agents doit prendre en compte les communications (interactions) entre tâches. • Exemple : si deux agents doivent se transférer des messages d’un MegaOctet sur une connexion à 50 Ko/s, le calcul perd 20s • La mobilité peut-elle aider à l’équilibrage de charge ? • Pas de garantie de l’optimalité d’une répartition • Dynamique du placement basée sur les traces d’exécution