Download
1 / 52
540 likes | 678 Views
Projective Geometric Computing. Speaker : Ambjörn Naeve, Ph.D., Senior researcher. Affiliation : Centre for user-oriented IT-Design (CID) Dept. of Numerical Analysis and Computing Science Royal Institute of Technology (KTH) 100 44 Stockholm, Sweden.

E N D
Projective Geometric Computing Speaker: Ambjörn Naeve, Ph.D., Senior researcher Affiliation: Centre for user-oriented IT-Design (CID) Dept. of Numerical Analysis and Computing ScienceRoyal Institute of Technology (KTH)100 44 Stockholm, Sweden Research: Ambjörn is presently investigating principles for the development of interactive learning environments with a focus on mathematics. email-address: amb@nada.kth.se web-sites: www.nada.kth.se/cid cid.nada.kth.se/il
Projective Drawing Board (PDB) PDB is an interactive program for doing plane projective geometry that will be used to illustrate this lecture. PDB has been developed by Harald Winroth and Ambjörn Naeveas a part of Harald’s doctoral thesis work at the Computational Vision and Active Perception (CVAP) laboratory at KTH . PDB is avaliable as freeware under Linux. www.nada.kth.se/~amb/pdb-dist/linux/pdb2.5.tar.gz
Geometric algebra in n-dim Euclidean space Underlying vector space Vnwith ON-basise1,...,en. Geometric algebra: has 2ndimensions. A multivector is a sum of k-vectors: A k-vector is a sum of k-blades: A k-blade = blade of grade k: Note: are linearly independent. Hence: the grade of a blade is the dimension of the subspace that it spans.
equivalence class of directed equal orientation and blade of grade ... ... ... Blades correspond to geometric objects line segments length 1 area 2 surface regions 3 volume 3-dim regions k k-volume k-dim regions
b a = ⁄ b ⁄ ^ ^ ^ b b b a a b b ⁄ ⁄ a b a a a ^ ^ ^ b = = a = b b R R a a b R R a a b = ⁄ ⁄ a Some equivalence operations on 2-blades
Pseudoscalars and duality Def: A n-blade in Gn is called a pseudoscalar. A pseudoscalar: A unit pseudoscalar: The bracket of P: The dual of a multivector x: Notation: If A is a k-blade, then Note: is a (n-k)-blade.
To every non-zero m-blade with If is an ON-basis for and if for i = 1,…,m , then . The subspace of a blade Fact: there corresponds a m-dim subspace . Fact:
. and . . Dual subspaces <=> orthogonal complements If A is a non-zero m-blade Fact: We can WLOG choose an ON-basis for Vn Proof: such that We then have which implies that
Given blades A and B, if there exists a blade C Def: we say that such that The join and the meet of two blades A is a dividend of B and B is a divisor of A. Def: The join of blades A and B is a common dividend of lowest grade. Def: The meet of blades A and B is a common divisor of greatest grade. The join and meet provide a representation in geometric algebra of the lattice algebra of subspaces of Vn.
For two blades A and B with Def: we can define: . In this case: and . a b Join of two blades <=> sum of their subspaces Example:
If blades . In this case: . Note: The meet product is related to the outer productby duality: Meet of blades <=> intersection of subspaces Def: and then:
~ ⁄ ⁄ ~ ~ ~ ~ Dual outer product Dualisation: Dual outer product:
, , Example: Hence:
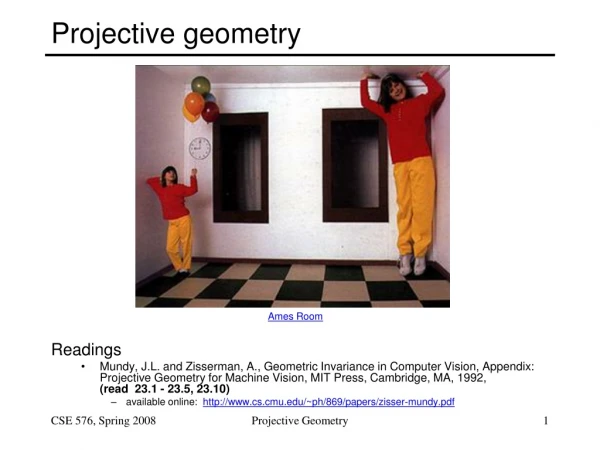
Projective geometry - historical perspective 1-d subspace parallell to the ground plane point at infinity line at infinity horizon eye parallelllines point ground plane 1-dim subspace through the eye
. . B n-dimensional projective space Pn = the set of non-zero subspaces of Vn+1. (spanned by a 1-bladea). A pointp is a 1-dim subspace A linel is a 2-dim subspace (spanned by a 2-bladeB2). Let B denote the set of non-zero blades of the geometric algebra G(Vn+1) . Hence we have the mapping B B Œ . Œ
Line: a b The projective plane P2
{non-zero 2-blades in G3} . A B The intersection of two lines in P2
p q r The pointsp, q, r are collinear if and only if . Collinear points
Q R P The linesP, Q, R are concurrent if and only if . Concurrent lines
Desargues’ configuration (cont.) Leads to: = 0 if and only if = 0 if and only if p,q,rare collinear P,Q,Rare concurrent
B C A P B’ A’ C’ R L Q Desargues’ theorem p, q, r are collinear iff P, Q, R are concurrent.
Pascal’s theorem be five given points in Let . Consider the second degree polynomial given by . It is obvious that and easy to verify that . must be the equation Hence: of the conic on the 5 given points.
same line same point Verifying that p(a´)=0
Pascal’s theorem (cont.) Hence, a sixth point lies on this conic if and only if . Geometric formulation: The three points of intersection of opposite sides of a hexagon inscribed in a conic are collinear. This is a property of the hexagrammum mysticum, which Blaise Pascal discovered in 1640, at the age of 16.
1 4 = ⁄ 3 2 5 6 = = ⁄ ⁄ Pascal’s theorem (cont.) 5 3 1 4 6 2
L Q P’ P Q’ R’ R Pascal’s theorem (cont.) The three points of intersection of opposite sides of a hexagon inscribed in a conic are collinear.
Q R P’ P Q’ L R’ Pappus’ theorem (ca 350 A.D.) If the conic degenerates into two straight lines, Pappus’ theorem emerges as a special case of Pascal’s.
Outermorphisms Def: A mapping is called an outermorphism if f is linear. (i) (ii) (iii) (iv)
The induced outermorphism Let denote a linear mapping. T induces an outermorphism Fact: given by , and linear extension. T maps the blades of V Interpretation: in accordance with how T maps the vectors of V.
. Polarization with respect to a quadric in Pn Let denote a symmetric linear map, which means that . , The corresponding quadric (hyper)surface Q in is given by . The polar of the k-blade A with respect to Q Def: is the (n+1-k)-blade defined by
Polarization (cont.) Note: . In this case and polarization becomes identical to dualization. For a blade A we have Fact: (i) If A istangent to Q (ii) then PolQ(A) is tangent to Q . If x isa point on Q, Especially: then PolQ(x) is the hyperplane which is tangent to Q at the point x.
Polarity with respect to a conic The polar of the join of x and y = is the meet of the polars of x and y =
~ ~ . Polar reciprocity Let represent two points in . : Then we have from the symmetry of Hence: i.e. the pointy lies on the polar of the point x if and only if x lies on the polar of y.
1 4 1 2 3 2 5 4 5 3 6 6 Brianchon’s theorem Pascal line (1640) Brianchon point (1810)
. ~ ~ G G ~ ~ G G ~ f G G The dual map Let be linear, and assume that The dual map Def: is the linear map given by Note:
Polarizing a quadric with respect to another Let and be symmetric outermorphisms, and let , be the corresponding two quadrics. Polarizing the multivectors of the quadric P Fact: with respect to the quadric Q gives a quadric R with equation . and we have
R Q P The reciprocal quadric P : Polarizing the quadric Q : with respect to the quadric R : generates the quadric
n x A Œ Œ y Vn+1 Vn Vn Œ x x Œ * * y welldefined x * en+1 Vn Vn y Affine space n A x Vn+1 * * en y y e1 * * Vn x Cartesian space Cartesian-Affine-Projective relationships Vn The affine part of Projective Space: Œ Œ
*( ) a,b,c,d A,B,C,D = (A (C D) B) ⁄ ⁄ ⁄ *( ) p P e3 Affine plane c b p a R2 d Cartesian plane The intersection of two lines in the plane C B P A D
0 = does not contain e3 The intersection of two lines (cont.)
does not does not contain e3 contain e3 The intersection of two lines (cont.) In the same way we get Hence we can write p as:
. m(s+ds) = m(s) = m1 m t s t1 M u p u1 q = r u1) u) (m1 (m ⁄ ⁄ ⁄ lim dsÆ0 Reflection in a plane-curve mirror m(s) = = t(s+ds) = -t(p-m)t = - t1(p-m1)t1 in-caustic out-caustic curvature centre of the mirror
Reflection in a plane-curve mirror (cont.) Making use of the intersection formula deduced earlier and introducing for the unit mirror normal we get This is an expression of Tschirnhausen’s reflection law.