Download
1 / 12
140 likes | 388 Views
Markov Random Fields (MRF). Spring 2009. Ben-Gurion University of the Negev. Instructor. Dr. H. B Mitchell email: harveymitchell@walla.co.il. Sensor Fusion Spring 2009. Markov Random Field. MRF: A probabilistic model defined by local conditional probabilities.

E N D
Markov Random Fields (MRF) Spring 2009 Ben-Gurion University of the Negev
Instructor • Dr. H. B Mitchell email: harveymitchell@walla.co.il Sensor Fusion Spring 2009
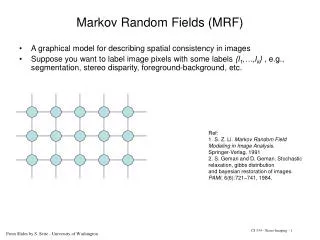
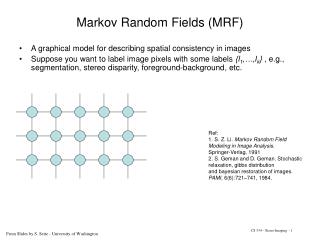
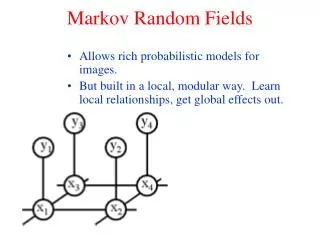
Markov Random Field • MRF: A probabilistic model defined by local conditional probabilities. • In image fusion it provides a convenient way to exploit pixel dependencies in fusion process. • Notation: is the conditional probability of gray-level G(m,n) at pixel (m,n) given the gray-levels in the neighborhood of (m,n) Neighborhood of (m,n) Center pixel (m,n) Sensor Fusion Spring 2009
MRF Fusion of Multiple Thresholded Images • Multiple thresholding algorithms. • Experiments show that different thresholding react differently to different pictures: Sensor Fusion Spring 2009
MRF Fusion of Multiple Thresholded Images • Experiments show that different thresholding react differently to different pictures: • MRF provides a way of fusing them together taking into account context Sensor Fusion Spring 2009
MRF Fusion of Multiple Thresholded Images • Given thresholded images • Seek a binary image such that • Theory of MRF suggests can find by minimizing a sum of local energy functions: Sensor Fusion Spring 2009
MRF Fusion of Multiple Thresholded Images • The local energy has following form • Split this into spatial context and inter-image context: Sensor Fusion Spring 2009
MRF Fusion: Spatial Context • Spatial context is Write it as a sum of number of times B(m,n) is different from B(p,q): Sensor Fusion Spring 2009
MRF Fusion: Inter-Image Context • Inter-image context is Write it as a sum of number of times B(m,n) is different from Sensor Fusion Spring 2009
MRF Fusion: Inter-Image Context • The formula: means the inter-image context does not depend on how the accuracy of the thresholding algorithm varies with the pixel gray-levels. • We correct for this by rewriting the inter-image context as where Sensor Fusion Spring 2009
MRF Fusion: Inter-Image Context • We use the same considerations to calculate the weights where Sensor Fusion Spring 2009
Algorithm • Solve MRF equations iteratively • Initialization. Set spatial context to zero: • Iterations. For each iteration update by minimizing • Stop. Stop when difference between solution obtained at kth iteration and (k+1)th iteration is sufficiently small. Sensor Fusion Spring 2009