Download
1 / 32
320 likes | 336 Views
Investigate the use of Markov Random Fields for mesh smoothing, focusing on feature-preserving techniques. Learn about MRF theory, likelihood functions, optimization methods, and alternative formulations for achieving smooth meshes. Results and discussions on edge labeling, feature detection, and feature-preserving mesh smoothing are provided. Explore potential improvements and future directions in mesh optimization.

E N D
Smoothing 3D Meshes using Markov Random Fields Vedrana Andersen
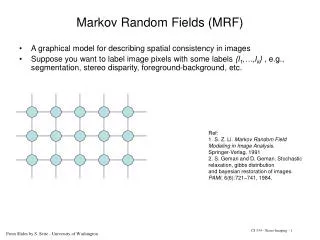
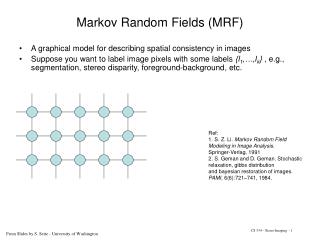
Overview • Aim: To investigate the use of Markov Random Fields (MRF) for formulating priors on 3D surfaces represented as triangle meshes • Focus on: Mesh smoothing, feature-preserving mesh smoothing (preserving surface ridges) • Vertex process and edge process
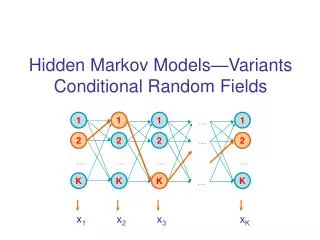
MRF THEORYMarkov Random Fields • Random fields, sites, labels, labeling • Markov Random Fields, Markovianity, neighborhood system and cliques • Markov-Gibbs equivalence • Gibbs Random Fields (Gibbs distribution)
MESH SMOOTHINGSmoothness Prior • Mesh smoothing: sites – vertices, labels – spatial positions of vertices • Absolute mean curvature: dihedral angle and edge length • Potential of the smoothness prior
MESH SMOOTHINGSmoothness Prior • Potential assigned to all 4-cliques of vertices
MRF THEORYMAP-MRF Labeling • Maximum a-posteriori solution • Bayes rule • In terms of energy
MESH SMOOTHINGLikelihood Function • Input mesh – underlying surface corrupted by noise • Noise: isotropic Gaussian • Likelihood energy
MESH SMOOTHINGOptimization • Metropolis sampler with simulated annealing • Sampling – new candidate positions • Metropolis criterion • Cooling scheme
MESH SMOOTHINGOptimization • Optimization parameters: • Sampling step size • Initial temperature and annealing constant • Modeling parameter: • Weight of the data term
MESH SMOOTHINGResults • 10x10x10 cube corrupted with Gaussian noise (σ=0.3 average edge length) • Very slow cooling, 500 iterations, (Fig. 7.3)
MESH SMOOTHINGResults • Monitoring the potentials and the number of updates over time
MESH SMOOTHINGResults • Smoothing with a zero temperature, 100 iterations, (Fig. 7.5)
MESH SMOOTHINGDiscussion • Convergence, monitoring • Sensitive to the size of the sampling step • Optimization? Annealing? • What is a smooth mesh?
MESH SMOOTHINGAlternative Formulations • Original formulation – dihedral angles and edge lengths • Quadratic and square-root potentials
MESH SMOOTHINGAlternative Formulations • Angle based potential – indifferent • Quadratic – over-smoothing • Square root – feature preserving
MESH SMOOTHINGAlternative Formulations • Results of using curvature-based, quadratic and square-root potential, 300 iterations (Fig. 7.15)
MESH SMOOTHINGAlternative Formulations • Feature preserving – thresholded smoothness potential, implicit edge labeling • Conclusion: Control achieved by the choice of the smoothness potential
FEATURE DETECTIONEdge Labeling • Detecting feature edges – ridges of the underlying surface • Idea: To use edge labels as weights for smoothing process • Based on: • edge sharpness, • neighborhood support.
FEATURE DETECTIONEdge Labeling • Edge labeling: • continuous or discrete, • deterministic or stochastic.
FEATURE DETECTIONRidge Sharpness • Sharpness threshold Ф0 • Deterministic case: • thresholding, • cut-off function.
FEATURE DETECTIONRidge Sharpness • Stochastic case (MRF framework, assigning sharpness potential to 1-edge cliques of edges): • linear potential • alternative: difference from cut-off function
FEATURE DETECTIONNeighborhood Support • Support threshold θ0 • Idea: Presence of sharp edges in the neighborhood influences labeling
FEATURE DETECTIONNeighborhood Support • Stochastic case • discrete linear formulation • alternative: penalizing label differences along a line
FEATURE DETECTIONEdge Labeling Results • Labeling edges of the fandisk model, (Fig. 9.2)
FEATURE DETECTIONTwo Questions • Two questions: • Neighborhood support – does it help? • If not, edge sharpness – is it needed? • Relevant for coupled models
FEATURE-PRESERVING MESH SMOOTHINGCoupled Model • Using edge labels as weights • Potentials contributing to the total posterior energy: • smoothness, • likelihood, • edge labeling (sharpness and neighborhood support)
FEATURE-PRESERVING MESH SMOOTHINGCoupled Model • Minimizing total posterior energy, or… • Alternating between vertex process and edge process • Independent cooling schemes • Ordering of vertex and edge process
FEATURE-PRESERVING MESH SMOOTHINGResults • Smoothing the noisy cube, noise 0.2 average edge length, (Fig. 11.5)
FEATURE-PRESERVING MESH SMOOTHINGResults • Reconstructing the fandisk model, noise 0.2 average edge length, (Fig. 11.7)
FEATURE-PRESERVING MESH SMOOTHINGDiscusion • Two questions revisited: • Neighborhood support? • Edge labeling? • Control vs. automation
FEATURE-PRESERVING MESH SMOOTHINGPossible Improvements • Sampling (shape, adaptive step) • Optimization (deterministic?) • Larger neighborhood for edge labeling • Surface to surface smoothing • Mesh optimization Future work: • Piecewise-quadratic surfaces