Download
1 / 11
120 likes | 388 Views
Kaskadna položajna regulacija servopogona. Za servopogon načrtajte kaskadni hitrostni in položajni regulator. Zahteve za hitrostni in položajni regulator so:

E N D
Kaskadna položajna regulacija servopogona Servosistemi
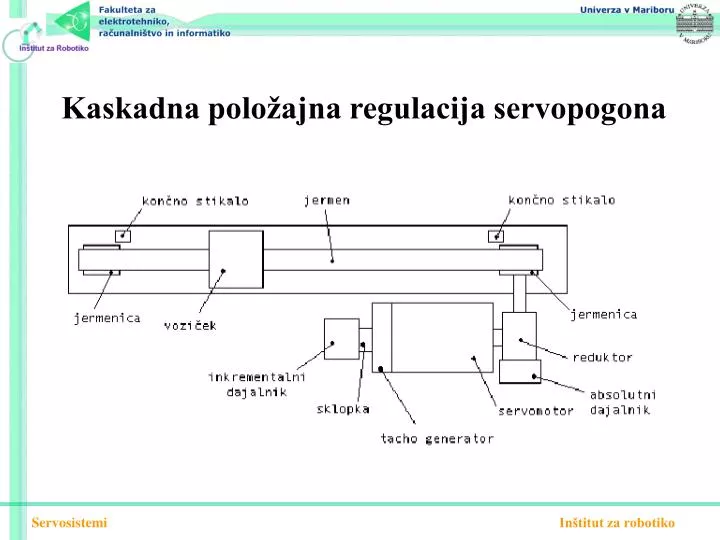
Za servopogon načrtajte kaskadni hitrostni in položajni regulator. Zahteve za hitrostni in položajni regulator so: Hitrostni regulator načrtajte tako, da bo imela zaprta hitrostna zanka predpisano dinamiko člena 1. reda z ojačanjem 1 (torej brez statičnega pogreška) in časovno konstanto 50 ms. Položajni regulator določite s pomočjo metode KLK tako, da bo imela položajna regulacijska zanka stopnični odziv brez prenihaja. Kaskadna položajna regulacija servopogona Servosistemi
Kaskadna položajna regulacija servopogona Na osnovi 2. Newtonovega zakona lahko opišemo dinamično obnašanje sistema z naslednjo diferencialno enačbo: kjer je : J - skupni vztrajnostni moment enosmernega motorja, reduktorja, jermenic in vozička b - kooeficient viskoznega trenja Mst - Coulombovo (suho trenje) w - hitrost vrtenja motorja ia - tok kotve DC motorja. Servosistemi
Vztrajnostni moment J v formuli je vsota posameznih vztrajnostnih momentov vseh komponent pogona (motorja, reduktorja, jermenic, vpliv mase vozička). Izračunamo ga po naslednji formuli: Kaskadna položajna regulacija servopogona Podatek proizvajalca: Servosistemi
Kaskadna položajna regulacija servopogona Skupni vztrajnostni moment je torej: Servosistemi
Podatki za servopogon so naslednji: J = 0.354 10-3 kgm2 Km = 0.13 Nm/A b = 1.09 10-3 Nms Kojač = 2.5A/V Mst = 0.15 Nm Kid = 5000/(2*p) Kaskadna položajna regulacija servopogona Servosistemi
Načrtovanje hitrostnega regulatorja: zapišemo prenosno funkcijo, ki povezuje hitrost motorja s napetostjo: Kaskadna položajna regulacija servopogona Kjer upoštevamo še konstanto skaliranja v direktni veji: Servosistemi
Na osnovi zahtev za hitrostno regulacijsko zanko izberemo tip regulatorja: PI regulator Določiti torej moramo časovno konstanto in ojačanje regulatorja: Ti izberemo enako časovni konstanti našega sistema: Ti=0.325s Za določitev KRpa zapišemo prenosno funkcijo zaprte regulacijske zanke: Kaskadna položajna regulacija servopogona Servosistemi
Nadaljujemo z načrtovanjem položajnega P regulatorja s pomočjo metode KLK. V ta namen zapišemo ustrezno prenosno funkcijo: Kaskadna položajna regulacija servopogona Servosistemi
Izvedba kaskadne položajne zanke v SIMULINKU Servosistemi
Implementacija kaskadne položajne zanke na realnem objektu Servosistemi