Download
1 / 32
320 likes | 440 Views
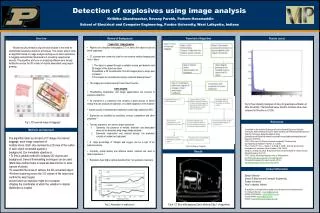
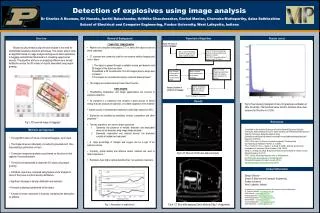
Development of a baggage scanning algorithm using image analysis techniques. KRITHIKA CHANDRASEKAR SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING. OVERVIEW . GRAYSCALING AND THRESHOLDING OTSU’S METHOD AND MATLAB’S GRAYTHRESH COMMAND CONNECTED COMPONENT ANALYSIS REGION GROWING CLUSTERING

E N D
Development of a baggage scanning algorithm using image analysis techniques KRITHIKA CHANDRASEKAR SCHOOL OF ELECTRICAL AND COMPUTER ENGINEERING
OVERVIEW • GRAYSCALING AND THRESHOLDING • OTSU’S METHOD AND MATLAB’S GRAYTHRESH COMMAND • CONNECTED COMPONENT ANALYSIS • REGION GROWING • CLUSTERING • FEATURE VECTOR ANALYSIS • CT IMAGES AND FILTERED BACK PROJECTION
GRAYSCALING • A grayscale digital image is an image in which the value of each pixel is a single sample, that is, it carries only intensity information. • The intensity of a pixel is expressed within a given range between a minimum and a maximum, inclusive. This range varies from 0 (total absence, black) and 1 (total presence, white), with any fractional values in between. • Technical uses (e.g. in medical imaging or remote sensing applications) often require more levels, to make full use of the sensor accuracy (typically 10 or 12 bits per sample) and to guard against round off errors in computations. Sixteen bits per sample (65,536 levels) is a convenient choice for such uses, as computers manage 16-bit words efficiently. • RGB images are converted into grayscale using gamma correction. Generally, 30 % red+59 % green + 11 % blue components are added together to give a grayscale image. The other common conversion method used is (11*R + 16*G + 5*B) /32 as it can be used efficiently for integer implementations. Fig 1: An example of a grayscale image
OTSU’S METHOD • The algorithm assumes that the image to be thresholded contains two classes of pixels (e.g. foreground and background) then calculates the optimum threshold separating those two classes so that their combined spread (intra-class variance) is minimal.The extension of the original method to multi-level thresholding is referred to as the Multi Otsu method. • In Otsu's method we exhaustively search for the threshold that minimizes the intra-class variance, defined as a weighted sum of variances of the two classes. Weights ωi are the probabilities of the two classes separated by a threshold t and variances of these classes. • Algorithm • Compute histogram and probabilities of each intensity level • Set up initial ωi(0) and μi(0) • Step through all possible thresholds maximum intensity • Update ωi and μi • Compute inter class variance • Desired threshold corresponds to the maximum inter class variance
GRAYTHRESH COMMAND - MATLAB graythresh - Global image threshold using Otsu's method level = graythresh(I)[level EM] = graythresh(I)Description level = graythresh(I) computes a global threshold (level) that can be used to convert an intensity image to a binary image with im2bw. level is a normalized intensity value that lies in the range [0, 1]. The graythresh function uses Otsu's method, which chooses the threshold to minimize the intraclass variance of the black and white pixels. [level EM] = graythresh(I) returns the effectiveness metric, EM, as the second output argument. The effectiveness metric is a value in the range [0 1] that indicates the effectiveness of the thresholding of the input image. The lower bound is attainable only by images having a single gray level, and the upper bound is attainable only by two-valued images. Class Support The input image I can be of class uint8, uint16, int16, single,or double and it must be nonsparse.
CONNECTED COMPONENT ANALYSIS Once region boundaries have been detected, it is often useful to extract regions which are not separated by a boundary. Any set of pixels which is not separated by a boundary is call connected. Each maximal region of connected pixels is called a connected component. The set of connected components partition an image into segments. Let s be a neighborhood system. – 4-point neighborhood system – 8-point neighborhood system • Let c(s) be the set of neighbors that are connected to the point s. For all s and r, the set c(s) must have the properties that – c(s) ε s – r ε c(s) , s ε c(r) A region R S is said to be connected under c(s) if for all s, r 2 R there exists a sequence of M pixels, s1, · · · , sM such that s1 ε c(s), s2 ε c(s1), · · · , sMε c(sM−1), r ε c(sM) i.e. there is a connected path from s to r. *www.ee.mit.edu/ece590/lecture_notes/ece590H
CONNECTED COMPONENT EXTRACTION Iterate through each pixel in the image. • Extract connected set for each unlabeled pixel. ClassLabel = 1 Initialize Yr = 0 for r Є S For each s Є S { if(Ys = 0) { ConnectedSet(s, Y,ClassLabel) ClassLabelClassLabel + 1 } }
EXAMPLE 1 s = (i, j); ClassLabel (0, 0); 1 The segmentation Y j 0 1 2 3 4 i 0 1 0 0 0 0 1 1 1 0 0 0 2 0 1 1 0 0 3 0 1 1 0 0 4 0 1 0 0 0 The image X j 0 1 2 3 4 i 0 1 0 0 0 0 1 1 1 0 0 0 2 0 1 1 0 0 3 0 1 1 0 0 4 0 1 0 0 1
EXAMPLE 2 s = (i, j); ClassLabel (0, 1); 2 The image X j 0 1 2 3 4 i 0 1 0 0 0 0 1 1 1 0 0 0 2 0 1 1 0 0 3 0 1 1 0 0 4 0 1 0 0 1 The segmentation Y j 0 1 2 3 4 i 0 1 2 2 2 2 1 1 1 2 2 2 2 0 1 1 2 2 3 0 1 1 2 2 4 0 1 2 2 0
EXAMPLE 3 s = (i, j); ClassLabel (2, 0); 3 The image X j 0 1 2 3 4 i 0 1 0 0 0 0 1 1 1 0 0 0 2 0 1 1 0 0 3 0 1 1 0 0 4 0 1 0 0 1 The segmentation Y j 0 1 2 3 4 i 0 1 2 2 2 2 1 1 1 2 2 2 2 3 1 1 2 2 3 3 1 1 2 2 4 3 1 2 2 0
EXAMPLE 4 s = (i, j); ClassLabel (4, 4); 4 The image X j 0 1 2 3 4 i 0 1 0 0 0 0 1 1 1 0 0 0 2 0 1 1 0 0 3 0 1 1 0 0 4 0 1 0 0 1 The segmentation Y j 0 1 2 3 4 i 0 1 2 2 2 2 1 1 1 2 2 2 2 3 1 1 2 2 3 3 1 1 2 2 4 3 1 2 2 4
REGION GROWING • Region growing is a simple region-based image segmentation method. It is also classified as a pixel-based image segmentation method since it involves the selection of initial seed points. • This approach to segmentation examines neighboring pixels of initial “seed points” and determines whether the pixel neighbors should be added to the region. • The first step in region growing is to select a set of seed points. Seed point selection is based on some user criterion (for example, pixels in a certain gray-level range, pixels evenly spaced on a grid, etc.). The initial region begins as the exact location of these seeds. The regions are then grown from these seed points to adjacent points depending on a region membership criterion. The criterion could be, for example, pixel intensity, gray level texture, or color. • Since the regions are grown on the basis of the criterion, the image information itself is important. For example, if the criterion were a pixel intensity threshold value, knowledge of the histogram of the image would be of use, as one could use it to determine a suitable threshold value for the region membership criterion.
K means clustering In statistics and machine learning, k-means clustering is a method of cluster analysis which aims to partition n observations into k clusters in which each observation belongs to the cluster with the nearest mean. • The K means algorithm will do the three steps below until convergence • Iterate until stable (= no object move group): • Determine the centroid coordinate • Determine the distance of each object to the centroids • Group the object based on minimum distance The aim of this method is to minimize the objective function: • where is a chosen distance measure between a data point and the cluster centre , is an indicator of the distance of the n data points from their respective cluster centres
FEATURE VECTOR ANALYSIS In pattern recognition and machine learning, a feature vector is an n-dimensional vector of numerical features that represent some object. Many algorithms in machine learning require a numerical representation of objects, since such representations facilitate processing and statistical analysis. When representing images, the feature values might correspond to the pixels of an image, when representing texts perhaps to term occurrence frequencies. A common example of feature vectors appears when each image point is to be classified as belonging to a specific class. Assuming that each image point has a corresponding feature vector based on a suitable set of features, meaning that each class is well separated in the corresponding feature space, the classification of each image point can be done using standard classification method.
CT IMAGE FORMATION • The formation of a CT image is a distinct three phase process. • The scanning phase • The reconstruction phase • The visible and displayed analog image (shades of gray) is produced by the digital-to analog conversion phase.
Scanning Phase During the scanning phase a fan-shaped x-ray beam is scanned around the body. The amount of x-radiation that penetrates the body along each individual ray (pathway) through the body is measured by the detectors that intercept the x-ray beam after it passes through the body The projection of the fan-shaped x-ray beam from one specific x-ray tube focal spot position produces one view. Many views projected from around the patient's body are required in order to acquire the necessary data to reconstruct an image.
CT IMAGE QUALITY Like all medical images, CT images have the five specific image quality characteristics. They are: • Contrast Sensitivity (very high for CT) • Blurring and visibility of Detail • Visual Noise • Artifacts • Spatial (Tomographic slice or volume views) Each of these characteristics are affected by the selection of protocol factor values that control the imaging process.
THE COMPLETE SCAN A complete scan is formed by rotating the x-ray tube completely around the body and projecting many views. Each view produces one "profile" or line of data as shown here. The complete scan produces a complete data set that contains sufficient information for the reconstruction of an image. In principle, one scan produces data for one slice image. However, with spiral/helical scanning, there is not always a one-to-one relationship between the number of scans around the body and the number of slice images produced.
CT IMAGING PROCESS The principle objective of CT imaging is to produce a digital image (a matrix of pixels) for a specific slice of tissue. During the image reconstruction process, the slice of tissue is divided into a matrix of voxels (volume elements). As we will see later, a CT number is calculated and displayed in each pixel of the image. The value of the CT number is calculated from the x-ray attenuation properties of the corresponding tissue voxel.
MOVEMENT OF BEAMS DURING SCAN There are two distinct motions of the x-ray beam relative to the patient's body during CT imaging. One motion is the scanning of the beam around the body. The other motion is the movement of the beam along the length of the body. Actually, this is achieved by moving the body through the beam as it is rotating around.
SCAN AND STEP SCANNING Scan and step is one mode of scanning. It was the first scanning mode developed and is still used today for some procedures. One complete scan around the body is made while the body is not moving. Then the body is moved to the next slice position. The principle characteristic (and limitation) of this mode is that the data set is fixed to a specific slice of tissue. This means that the slice thickness, position, and orientation is "locked in" during the scanning phase.
HELICAL SCANNING Spiral or helical scanning is a more recently developed mode and is used for many procedures. The patient's body is moved continuously as the x-ray beam is scanned around the body. This motion is controlled by the operator selected value of the pitch factor. As illustrated, the pitch value is the distance the body is moved during one beam rotation, expressed as multiples of the x-ray beam width or thickness. If the body is moved 10 mm during one rotation, and the beam width is 5 mm, the pitch will have a value of 2.
CHANGING THE PITCH When the pitch is increased, the x-ray beam appears to move faster along the patient's body. During the same time (as illustrated), the x-ray beam will be spread over more of the body when the pitch is increased. This has three major effects. Scan time will be less to cover a specific body volume. The radiation is less concentrated so dose is reduced. There will not be as much "detail" in the data and image quality might be reduced
RECONSTRUCTION Image reconstruction is the phase in which the scan data set is processed to produce an image. The image is digital and consist of a matrix of pixels. "Filtered" refers to the use of the digital image processing algorithms that are used to improve image quality or change certain image quality characteristics, such as detail and noise. "Back projection" is the actual process used to produce or "reconstruct" the image.
CONCEPT OF FILTERED BACK PROJECTION We start with one scan view through a body section that contains two objects. The data produced is not a complete image, but a profile of the x-ray attenuation by the objects. Let's now take this profile and attempt to draw an image by "back projecting" the profile onto our image surface. As we see, there is only enough information in the profile to allow us to draw in streaks.
FBP CONTINUED We have now rotated the x-ray beam around the body by 900 and obtained another view. If we now back project this profile onto our image area we see the beginnings of an image showing the two objects. Several hundred views are used to produce clinical CT images
FBP-A MATHEMATICAL DERIVATION Assume a computerised tomography set up with rays parallel to the y-axis directed upwards. Assume absorbing density in the plane to be , where function has a compact support. Signal intensity registered on the x axis, will then be: Now consider a two-dimensional Fourier transform of function : Taking the one-dimensional Fourier Transform of the projection along the y axis gives us the (k,0) line in the Fourier space of .
FBP CONTINUED We can now rotate our set-up and obtain lines in the Fourier space of under any Angle by calculating one-dimensional Fourier transforms of measured parallel projections, and in this way effectively reconstructing the whole M(k, l). Once we have M(k, l) we can then obtain by taking the inverse Fourier Transform of M(k, l). It is convenient in this case to write it all down in terms of the rotation angle . Consider rotating the system of coordinates as follows: The inverse transform yields :
FBP CONTINUED b(x’)=
FBP CONTINUED Since is the inverse Fourier Transform of , the Fourier Transform the filtered projection is the convolution of and b(x').
CT NUMBERS The CT numbers are calculated from the x-ray linear attenuation coefficient values for each individual tissue voxel. It is the attenuation coefficient that is first calculated by the reconstruction process and then used to calculate the CT number values. Note that water is the reference material for CT numbers and has an assigned value of zero. Tissues or materials with attenuation (density) greater than water will have positive CT numbers. Those that are less dense will have negative CT numbers. X-ray attenuation depends on both the density and atomic number (Z) of materials and the energy of the x-ray photons. For CT imaging a high KV (like 120-140) and heavy beam filtration is used. This minimizes the photoelectric interactions that are influenced by the Z of a material. Therefore, CT numbers are determined by the density of the tissues or materials. CT numbers are in Hounsfield Units.