Download
1 / 41
430 likes | 634 Views
Intro to Simulation and Virtual reality – CE00166-1. An overview of VR and simulation Practical application of theory Module Leader - Bob Hobbs semester 1 Core Module for VR award. What is the structure?. Shared with Engineering School 1 lecture (2hrs) F14 1 practical tutorial K102.

E N D
Intro to Simulation and Virtual reality – CE00166-1 • An overview of VR and simulation • Practical application of theory • Module Leader - Bob Hobbs • semester 1 • Core Module for VR award
What is the structure? • Shared with Engineering School • 1 lecture (2hrs) F14 • 1 practical tutorial K102
How is it assessed ? • 1 phased assignment based on tutorial work • 1 written report based on project work
Principles and types of VR Simulation methods Games Software Underlying mathematical concepts VRML Real time data acquisition from VR input devices Projection What topics will I cover?
What is Virtual reality? • emulating the real world • making an electronic world seem real • Being able to interact with the electronic representation • moving within the world • manipulating objects in the world
types of VR • desktop collaboration • video image on screen • computer tools - may be web-based • video of room/work in progress • see other’s work projected on your desk! • immersive VR • helmet/goggles, data glove • Augmented VR • VR projected onto real life environment • physical world/VR mixes • Interaction between VR and external device
VR headsets • small TV screen for each eye • slightly different angles • 3D effect
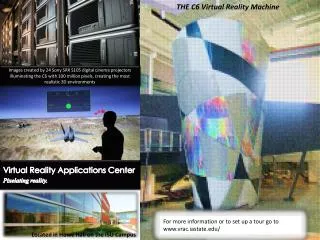
inside VR • scenes projected on walls • realistic environment • hydraulic rams! • real controls • other people
How does VR work • we live in a 3D world • We have developed many methods to make sense of the world around us • VR techniques have to try to recreate these methods
Blue hazing with distance • look at a distant hill or building • fuzzy, less contrast, bluish tinge • scattering effect of air • brains get used to it: • blue objects seem further away • red ones closer • use in visualisation and VR(also used in garden design!)
Involves the senses • sight: • visual realism, 3D effects: shadows, etc., • sound: • surround sound, sub-seat woofers etc. • touch: • feedback from(and to) touch-sensitive gloves
VRML file format • filename (URL) ends ".wrl” • c.f. .html, .gif, .jpg etc. • VRML 1.0 first line: #vrml 1.0 ascii • VRML 2.0 first line: #vrml 2.0 utf8 • can have binary versions too
contents of VRML file • one or more nodes • general formatDEF object objecttype { fieldname value . . . } • or simply:objecttype { fieldname value . . . }
sphere #VRML V1.0 ascii Sphere { radius 1 }
add colour #VRML V1.0 ascii Separator { # groups things together Material { diffuseColor 1.0 0 0 # red green blue } Sphere { radius 1 } }
a cone #VRML V1.0 ascii Separator { Material { diffuseColor 0 0 1 # bright blue } Cone { height 3 } }
put them together ... #VRML V1.0 ascii Separator { Separator { # for sphere Texture2 { filename "big_alan.jpg" } Sphere { radius 1 } } Separator { # for cone Material { diffuseColor 0 0 1 # bright blue } Cone { height 3 } } }
applications • Simulation • Learning • Modeling Behavior • Games
Optical Tomography David Brady Electrical and Computer Engineering UIUC
Argus • 64 cameras in 14’ diameter, 8’ tall cylinder • 32 node dual processor Beowulf Linux cluster • Cameras acquire 64 images in parallel at 60 Hz, synchronized and calibrated • Computed data includes • 3D computed tomography data volumes • Stereo pairs computed for any viewpoint in volume • Storing images on disk allows control over time dimension