Download
1 / 18
180 likes | 202 Views
Dive into the world of particle filters with this practical guide by Peter Jan van Leeuwen and Phil Browne. Understand how to optimize weights, propose-density freedom, and perform integral calculations efficiently. Learn to apply Bayes' Theorem and proposal densities effectively to improve particle filter performance. Explore practical applications, such as the barotropic vorticity equation, through experiments and analysis. Enjoy enhancing your knowledge and skills in particle filtering techniques!

E N D
Introduction to the Particle Filter Computer Practical Peter Jan van Leeuwen and Phil Browne
The Particle filter Use ensemble with the weights.
What are these weights? • For Gaussian distributed variables is is given by: • One can just calculate this value • That is all !!!
How to make particle filters useful? • Introduce localisation to reduce the number of observations. • Use proposal-density freedom. • Several ad-hoc combinations of Particle Filters and Ensemble Kalman Filters
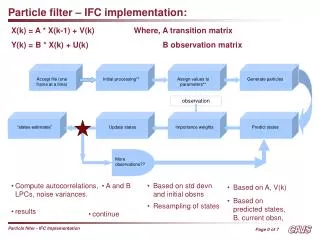
Bayes Theorem and the proposal density Bayes Theorem now becomes: We have a set of particles at time n-1 so we can write and use this in the equation above to perform the integral:
The standard particle filter Performing the integral over the sum of delta functions gives: The posterior is now given as a sum of transition densities. This is the standard particle filter, also called Sequential Importance Resampling, or SIR. This scheme is degenerate when the number of observations Is large.
The proposal transition density Multiply numerator and denominator with a proposal density q: Note that 1) the proposal depends on the future observation, and 2) the proposal depends on all previous particles, not just one.
Between observations: relaxation We add a relaxation term to the model equation: How strong should the relaxation be?
How are the weights affected? Draw samples from the proposal transition density q, to find: with weights Likelihood weight Proposal weight
The equivalent-weights Particle Filter At the last time step towards the observations make sure all weights are approximately equal: • Set a target weight • Move each particle such that it has the target weight, using: • Give each particle small random perturbation.
The weights as function of the position in state space 1 4 3 Target weight 2 5 xin What should the target weight be?
Practical: the barotropic vorticity equation • Stochastic barotropic vorticity equation: • 256 by 256 grid - 65,536 variables • Double periodic boundary conditions • Semi-Langrangian time stepping scheme • Identical twin experiments over 1200 time steps • Observations every 50 time steps – decorrelation time of 42 • 24-48 particles
¼ Observations over half of state Truth Mean of particle filter ensemble
Experiment • Study influence of relaxation strength, or nudging strength (nudgefac) • Study influence of target weight, so how many particles can reach that weight, so percentage of particles to keep (keep). Looking at: • Trajectories, fields, RMSE • Histograms, pdfs
Rank Histograms SST (observed) Meridional wind high up in Atmosphere (unobserved)