Download
1 / 68
680 likes | 702 Views
Learn the concepts of force, net force, inertia, Newton's laws, free-body diagrams, and equilibrium in this comprehensive physics chapter. Explore the dynamics behind motion and the effects of different forces on objects.

E N D
Chapter 4: Force and Motion 4.1 The Concepts of Force and Net Force 4.2 Inertia and Newton’s First Law of Motion 4.3 Newton’s Second Law of Motion 4.4 Newton’s Third Law of Motion 4.5 Free-body Diagrams and Translational Equilibrium 4.6 Friction
Homework for Chapter 4 • Read Chapter 4 • HW 4A • HW 4B • HW 4C
4.1 The Concepts of Force and Net Force Systems: Essential Knowledge • Asystemis an object of collection of objects. • Objects are treated as having no internal structure. • Some elementary particles are fundamental particles (such as electrons). • Protons and neutrons are composed of fundamental particles (such as quarks). • Protons and neutrons might be treated as either systems or objects depending on the question being addressed. • The electric charges on neutrons and protons result from their quark compositions.
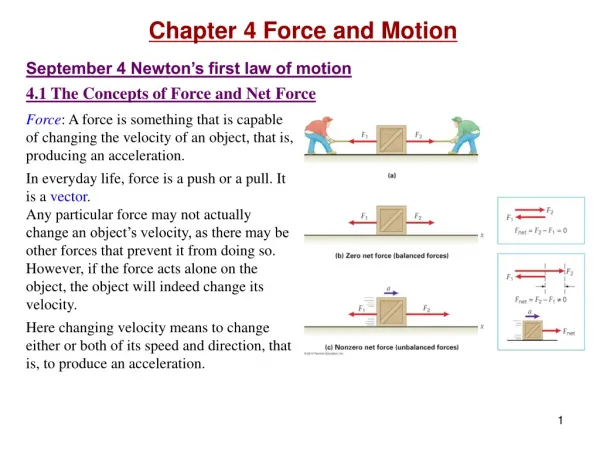
4.1 The Concepts of Force and Net Force dynamics– what causes motion and changes in motion. • Isaac Newton summarized the “why” of motion with three laws. force – something capable of changing an object’s state of motion (its velocity) • a vector quantity • SI unit is the newton • A newton of force causes a 1 kg mass to accelerate 1 m/s2. • 1 N = 1kg · m s2 net force – the vector sum, or resultant, of all the forces acting on an object. • can be written as ∑ F • balanced forces create zero net force • unbalanced forces create a net force • a net force produces an acceleration
4.2 Inertia and Newton’s First Law of Motion inertia – the natural tendency of an object to maintain a state of rest or to remain in uniform motion in a straight line (constant velocity). inertial frame of reference – a non-accelerating frame of reference. - a frame of reference where Newton’s 1st Law holds. ex: juggling on a bus travelling at constant velocity. non-inertial frame of reference – an accelerating frame of reference where fictitious forces arise. ex: having to hang on to a merry-go-round, or be thrown off! mass – a measure of inertia ** If the net force acting on an object is zero, then its acceleration is zero.***
4.2 Inertia and Newton’s First Law of Motion (Hint: Assume a constant value of zero is considered constant.)
Check for Understanding • Fill in the blanks using the word bank. • velocity mass dynamics weight “the same” • acceleration non-inertial kinematics inertial different • _________________is used to analyze motion, but ________________ explains what causes motion and changes in motion. • A(n)_____________ frame of reference is non-accelerating. • In a(n) ________________ frame of reference, fictitious forces arise. • The gravitational force on an object near Earth’s surface is called ________. • With no forces acting upon it, an object moves with constant ____________. • In an action/reaction pair, both forces must act on __________ object(s).
Check for Understanding • Fill in the blanks using the word bank. • velocity mass dynamics weight “the same” • acceleration non-inertial kinematics inertial different • Kinematics is used to analyze motion, but dynamics explains what causes motion and changes in motion. • A(n) inertial frame of reference is non-accelerating. • In a(n) non-inertial frame of reference, fictitious forces arise. • The gravitational force on an object near Earth’s surface is called weight. • With no forces acting upon it, an object moves with constant velocity. • In an action/reaction pair, both forces must act on different object(s).
Lesson 4.5: Free Body Diagrams and Translational Equilibrium
Fground on car Fforward Fresistance Fgravity
4.5 Free-body Diagrams and Translational Equilibrium Problems we will solve will generally have constant forces and therefore have constant accelerations. This allows us to use the kinematics equations and Newton’s Laws to analyze motion. Free-body Diagrams 1. Sketch the problem. Draw all force vectors. 2. Pick the body to be analyzed using a free-body diagram. Draw a dot at the center of this body. Draw the origin of your x-y axes at this point. Draw one of the axes along the direction of the body’s acceleration. 3. Draw and label all force vectors acting on the body with their tails on the dot. If the body is accelerating, draw an acceleration vector. 4. Resolve any forces not directed along an x or y axis into their components. 5. Use Newton’s second law to write equations for the x and y directions. Solve!
Solution: Isolate the body which we wish to analyze and draw a free-body diagram. T = tension holding up scale a = 20 m/s2 (this is what the scale will read) F.B.D. of spring scale weight = mg Fnet = T – mg and, Fnet = ma So, ma = T – mg Solve for T: T = ma + mg = m (a + g) = 100 kg (20 m/s2 + 10 m/s2) T = 3000 N, which is what the scale will read. The answer is d.
4.5 Free-body Diagrams and Translational Equilibrium Pulley Problems • a string is considered massless for our purposes • the tension is the same everywhere in a string • a single, fixed pulley simply changes the direction of a force Atwood’s Machine • The acceleration of an object depends on the net applied and the object’s mass. • In an Atwood’s Machine, the difference in weight between two hanging masses determines the net force acting on both masses. • This net force accelerates both hanging masses; the heavier mass is accelerated downward, and the lighter mass is accelerated upward.
Example 60: An Atwood machine has suspended masses of 0.25 kg and 0.20 kg. Under ideal conditions, what will be the acceleration of the smaller mass?
4.5 Free-body Diagrams and Translational Equilibrium Inclined Plane Problems Suppose we have a mass being accelerated by a rope up a frictionless inclined plane. 1. Make a sketch. Identify the forces acting on the mass. Here we have identified tension, weight, and the normal force. 2. Free-body diagram the mass. Draw a dot to represent the center of mass. Establish the x-axis along the plane, where positive is the direction of acceleration. The y-axis is perpendicular to the x-axis.
3. Draw force vectors in the proper directions pointing away from the dot. Draw an acceleration vector in the direction of the net force. 4. Resolve any forces that are not directed along the x or y axes into x or y components. Typically you will need to do this for the weight vector. Use the free-body diagram to analyze the forces in terms of Newton’s second law of motion.
Example 65: • In the ideal setup shown, m1 = 3.0 kg, m2 = 2.5 kg. • What is the acceleration of the masses? • What is the tension in the string?
4.5 Free-body Diagrams and Translational Equilibrium translational equilibrium – the object is at rest or constant velocity • the sum of the forces, Fnet = 0 • a = 0 static translational equilibrium – the object is at rest; v = 0 m/s. Hints for Static Equilibrium Problems • Remember, tension in a string is the same everywhere in the string. • Resolve force vectors into their components. • Sum x and y components separately. • Fnet = 0 for the x and y components