Download
1 / 7
70 likes | 89 Views
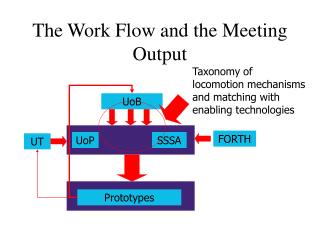
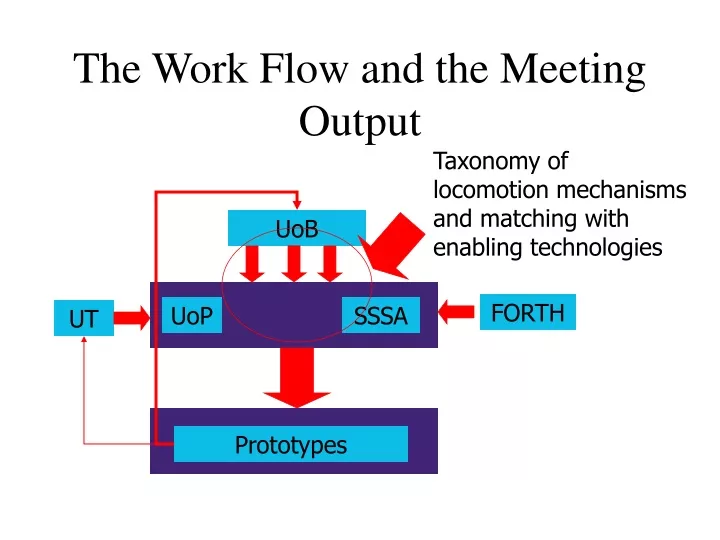
Taxonomy of locomotion mechanisms and matching with enabling technologies. The Work Flow and the Meeting Output. UoB. FORTH. UoP. SSSA. UT. Prototypes. IMPORTANT DECISIONS.

E N D
Taxonomy of locomotion mechanisms and matching with enabling technologies The Work Flow and the Meeting Output UoB FORTH UoP SSSA UT Prototypes
IMPORTANT DECISIONS • Are polychaete one potentially suitable animal model for devices capable of moving effectively in the gastrointestinal tract (or in other human cavities)? YES, but the inchworm too…
IMPORTANT QUESTIONS TO BE ANSWERED NOW • Do we have a reasonable biomechanical model of polichaete and inchworms, and of the GI boundary conditions to guide the design of a working biomimetic device and estimate the influence of different technical solutions? NOT YET, but we will work on it.
IMPORTANT QUESTIONS • Which mechanism for body motion (peristaltic, moving wave, random to purposive? others?) • Which type of legs and leg motion (piston-like, sweeping) ? • Which type of adhesion mechanism (vacuum, hooks, glue, clamping)?
IMPORTANT QUESTIONS TO BE ANSWERED • Which mechanical structure for the body (spine, balloon-like, others)? • Which mechanical structure for the legs? • Which shape, dimensions (total length, diameter) and other parameters (legs disposition, legs number, etc)?
Which actuators ? • Which sensors ? • Which control: autonomous, teleoperated… • Energy source (on board? External?) • Which tools on board ? • Which experimental test bed? How to compare performance?
Models: polychaete and inchworm • Theoretical models: Forth and SSSA • Experimental set up: IHCI • Prototypes: UBAH, UoP, SSSA, Forth • web site: Forth • Next meeting: • Date: March 14-15, 2003 • Location: Crete