Download
1 / 31
330 likes | 503 Views
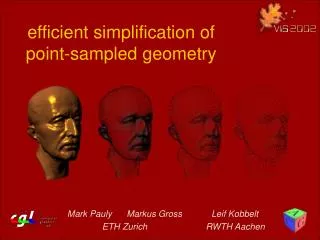
efficient simplification of point-sampled geometry. Jeffrey Sukharev CMPS260 Final Project. From the paper “Efficient Simplification of Point-Sampled Surfaces” by Mark Pauly, Markus Gross, Leif Kobbelt. outline. introduction surface model & local surface analysis point cloud simplification

E N D
efficient simplification of point-sampled geometry Jeffrey Sukharev CMPS260 Final Project From the paper “Efficient Simplification of Point-Sampled Surfaces” by Mark Pauly, Markus Gross, Leif Kobbelt
outline • introduction • surface model & local surface analysis • point cloud simplification • hierarchical clustering • iterative simplification • particle simulation • measuring surface error • comparison • conclusions
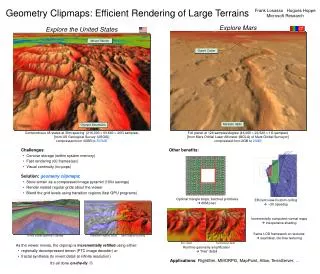
acquisition rendering processing introduction • 3d content creation • many applications require coarser approximations • editing • rendering surface simplification for complexity reduction
acquisition rendering processing raw scans point cloud triangle mesh registration reconstruction introduction • 3d content creation
acquisition rendering processing raw scans point cloud triangle mesh registration reconstruction simplification reduced point cloud introduction • 3d content creation
acquisition rendering processing raw scans point cloud registration simplification reduced point cloud introduction • 3d content creation
idea: locally approximate surface with polynomial • compute reference plane • compute weighted least-squares fit polynomial surface model • moving least squares (mls) approximation implicit surface definition using a projection operator Gaussian used for locality
surface model • moving least squares (mls) approximation implicit surface definition using a projection operator • idea: locally approximate surface with polynomial • compute reference plane • compute weighted least-squares fit polynomial Gaussian used for locality
local surface analysis • local neighborhood (k-nearest neighbors)
covariance matrix centroid eigenvalue problem local surface analysis • local neighborhood (e.g. k-nearest)
local surface analysis • local neighborhood (e.g. k-nearest) eigenvectors span covariance ellipsoid smallest eigenvector is normal surface variation measures deviation from tangent plane curvature
local surface analysis • example original mean curvature variation n=20 variation n=50
surface simplification • incremental clustering • hierarchical clustering • iterative simplification • particle simulation
incremental clustering • Clustering by growing regions • start with a random seed point • successively add nearest points to cluster until cluster reaches desired maximum size • the growth of clusters can also be limited be surface variation and in that way the curvature adaptive clustering is achieved.
incremental clustering • Incremental growth leads to some fragmentation. Therefore stray samples need to be added to closest clusters at the end of the run.
incremental clustering • each cluster is replaced by its centroid Origina model 34,384 points Simplified model 1,000 pts
incremental clustering • Results from my incremental clustering implementation. 1,222 pts 35,000 pts
surface simplification • incremental clustering • hierarchical clustering • iterative simplification • particle simulation
hierarchical clustering • top-down approach using binary space partition • recursively split the point cloud if: • size is larger than a user-specified threshold or • surface variation is above maximum threshold • split plane defined by centroid and axis of greatest variation • replace clusters by centroid
covariance ellipsoid split plane centroid hierarchical clustering • 2d example root
hierarchical clustering • 2d example
hierarchical clustering • 2d example
hierarchical clustering • 2d example
hierarchical clustering 43 Clusters 436 Clusters 4,280 Clusters
surface simplification • incremental clustering • hierarchical clustering • iterative simplification • particle simulation
iterative simplification • iteratively contracts point pairs • each contraction reduces the number of points by one • contractions are arranged in priority queue according to quadric error metric • quadric measures cost of contraction and determines optimal position for contracted sample • equivalent to QSlim except for definition of approximating planes
surface simplification • incremental clustering • hierarchical clustering • iterative simplification • particle simulation
particle simulation • Method proposed by Turk G. (for polygonal surfaces) • resample surface by distributing particles on the surface • particles move on surface according to inter-particle repelling forces • particle relaxation terminates when equilibrium is reached • can also be used for up-sampling!
measuring error • measure distance between two point-sampled surfaces S and S’ using a sampling approach • compute set Q of points on S • maximum error: • two-sided Hausdorff distance • mean error: • area-weighted integral of point-to-surface distances • size of Q determines accuracy of error measure
measuring error • d(q,S’) measures the distance of point q to surface S’ using the mls projection operator
conclusions • point cloud simplification can be useful to • reduce the complexity of geometric models early in the 3d content creation pipeline • create surface hierarchies • References • Mark Pauly et al “Efficient Simplification of Point Sampled Surfaces” • Mark Alexa et al “Point Set Surfaces” • Levin D. “Mesh-independent surface interpolation”