Download
1 / 14
140 likes | 271 Views
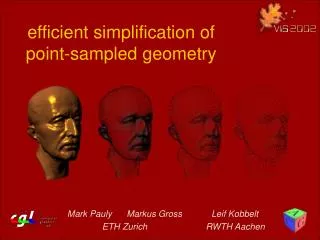
Efficient Simplification of Point-Sampled Surfaces. CGIV, 16 March 2006, Dongseo University. Graduate School of Software Dongseo University, Busan Nam Woo Kim, d5302010@dongseo.ac.kr http://kowon.dongseo.ac.kr/~d5302010. Polygonal Simplification.

E N D
Efficient Simplification of Point-Sampled Surfaces CGIV, 16 March2006, Dongseo University Graduate School of Software Dongseo University, Busan Nam Woo Kim, d5302010@dongseo.ac.kr http://kowon.dongseo.ac.kr/~d5302010
Polygonal Simplification • Simplification is the method to deform polygonal model. • The objectives of simplification • Keeping the originality and characteristic of given models. • Reducing the number of polygons.
Outline Point cloud Clustering Iterative Simplification Triangulation
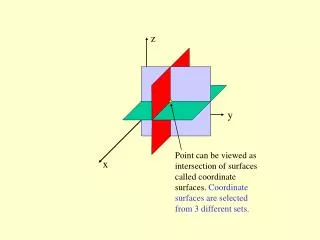
Local surface properties P1 P2 P3 P4 P5 P6
k k k P P P P ¡ r m a x = N i i i 2 ½ = p 2 r k -nearest neighbors r
T 0 1 0 1 ¡ ¡ p p p p i i n 1 1 1 N P P 3 3 £ X i ¡ ¡ p p p p p i i p p B C B C = i 2 2 C N i B C B C 2 n = j p ; . . B C B C i 1 = . . @ A @ A . . ¡ ¡ p p p p i i k k Covariance Analysis r Symmetric positive semi-definite matrix
f g ¸ ¸ ¸ l C N i 0 1 2 2 2 ¢ ¢ v p v v = l l l l l l i p ; ; ; ; Eigenalysis of covariance are real-valued eigenvectors from an orthogonal frame The measure the variation of the
( ) ¸ ¸ T P P v v x i 1 0 1 0 ¸ ( ) ( ) 0 ¸ ¸ ¸ T P 0 · · ¡ ( ) ¢ x : x v P = 0 1 2 0 ¾ = n ¸ ¸ ¸ + + 0 1 2 Normal Estimation Covariance ellipsoid
Clustering • Clustering by Region-growing • Hierarchical Clustering
C C C 0 1 2 Region-growing
BSP Tree in 2_Dimensional P P NULL
j j ( ) P P ¾ ¾ v n m a x 2 The size is larger than the user specified maximum cluster size or The variation is above a maximum threshold Hierarchical Clustering split plane leaf node =cluster centroid
P n 1 ( ) ( ) ¸ ¸ ¸ T P 0 · · ¡ X ¢ x : x v = 0 1 2 0 p p = i n i 1 = leaf node =cluster Iterative Simplification
Triangulation Voronoi diagram & Delaunay Triangulation’s Application