Download
1 / 7
70 likes | 239 Views
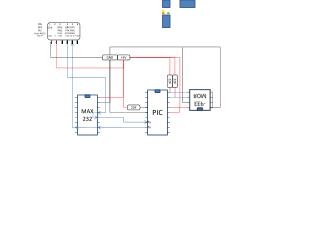
PIC を用いた ライントレーサーの制御. 工夫した点. センサーの状態をチェックするとき 曲がり角に来たとき 迷路解法. 迷路解法の方法. 右手(左手)法 右に曲がれるところでは常に曲がっていく 例外を除き必ずゴールできる 座標式 自分とゴールの座標を認識しつつ 最短ルートを探してゴールに向かう. 製作したプログラム. 右手法を使いながら自分の座標を確認、意味の無い右折をなくす 一回目の走行で EEPROM に記録 二回目の走行でそのデータを使い 無駄をなくしてゴールする. n=1. n=2. 一回目 右手法で走行(赤)し 一回来たことが

E N D
工夫した点 • センサーの状態をチェックするとき • 曲がり角に来たとき • 迷路解法
迷路解法の方法 • 右手(左手)法 右に曲がれるところでは常に曲がっていく 例外を除き必ずゴールできる • 座標式 自分とゴールの座標を認識しつつ 最短ルートを探してゴールに向かう
製作したプログラム • 右手法を使いながら自分の座標を確認、意味の無い右折をなくす 一回目の走行でEEPROMに記録 二回目の走行でそのデータを使い 無駄をなくしてゴールする
n=1 n=2 一回目 右手法で走行(赤)し 一回来たことが あったらnから1を引き EEPROMのn番地に チェックをいれる n=4 n=3 n=7 n=4 二回目 右手法で行き、チェックが あったら右手法を無視 して進む(青) n=6 n=5 n=6 n=7 チェックがあるところで 曲がると無駄になる
長所と短所 ・長所 右手法に比べて短時間でゴールできる 見た目わかりやすい仕組み ・短所 座標式に比べ時間がかかる場合がある 実は結構複雑なプログラム