Download
1 / 30
500 likes | 1.52k Views
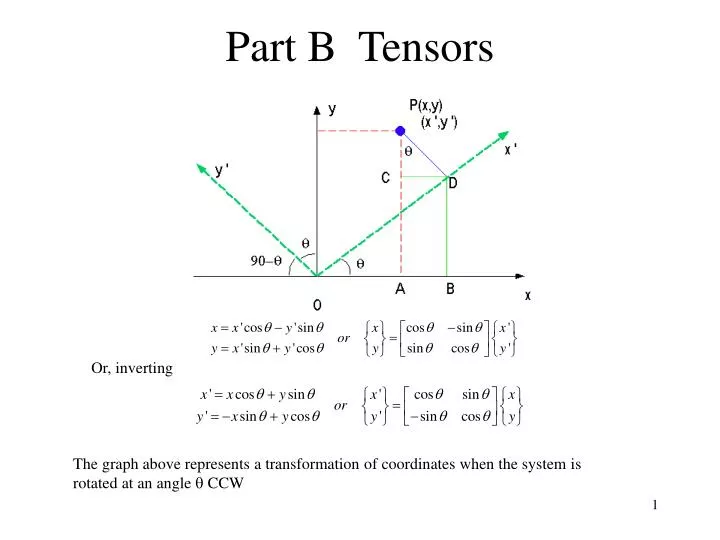
Part B Tensors. Or, inverting. The graph above represents a transformation of coordinates when the system is rotated at an angle CCW. 2B1 Tensors.

E N D
Part B Tensors Or, inverting The graph above represents a transformation of coordinates when the system is rotated at an angle CCW
2B1 Tensors Let be two vectors in a Cartesian coordinate system. If is a transformation, which transforms any vector into some other vector, we can write where and are two different vectors. If For any arbitrary vector and and scalar is called a LINEAR TRANSFORMATION and a Second Order Tensor. (1.1a) and (1.2a) can be written as,
2B1 Tensors Questions: Yes
2B1 Tensors Questions: Yes
2B2 Components of a Tensor Scalar has 1 component Vector has 3 component Tensor has ? component?
2B2 Components of a Tensor In general The components of Tij can be written as
2B2 Components of a Tensor (cont.) Example 2B2.3 Q: Let R correspond to a righ-hand rotation of a rigid body about the x3 axis by an angle . Find the matrix of R Thus Q: Let R correspond to a 90° right-hand rigid body rotation about the x3 axis. Find the matrix of R
2B3 Components of a transformed vector The transformation is linear if is then called a LINEAR TRANSFORMATION and is a second-order tensor.
2B3 Components of a transformed vector Now what is b? what are the components of b?
2B4 Sum of Tensors Definition:
2B5 Product of Two Tensors Components: or In general, the product of two tensors is not commutative:
2B5 Product of Two Tensors Q: Let R correspond to a 90° right-hand rigid body rotation about the x3 axis. Find the matrix of R Q: Let R correspond to a 90° right-hand rigid body rotation about the x1 axis. Find the matrix of S Q: Let W correspond to a 90° right-hand rigid body rotation about the x3 axis, then a 90° right-hand rigid body rotation about the x1 axis. Find the matrix of W
r ~ ~ a T T T 2B6 Transpose of a Tensor Transpose of is denoted by and . If then Note
2B7 Dyadic Product Definition , dyadic product of two vectors is also a tensor. It transforms a vector into a vector parallel to
2B9 Identity Tensor A linear transformation which transforms every vector into itself is an identify tensor
2B9 Inverse Tensor Note that
2B10 Orthogonal Tensor and Thus
~ ~ ~ = T Q Q I ~ ~ - = 1 Q Q I 2B10 Orthogonal Tensor (cont.) Thus Also, we have , So Thus for an orthogonal matrix, the transpose is also its inverse. Example: A rigid body rotation is an ORTHOGONAL tensor,
2B11 Transformation Matrix Between Two Coordinate Systems We see that,
2B11 Transformation Matrix Between Two Coordinate Systems(cont.) Q: Let be obtained by rotating the basis about the x3 axis by an angle . Find the transformation matrix of R from to Thus
2B13 Transformation law for tensor Let and Recall that the components of a tensor are:
2B13 Transformation law for tensor (cont.) Find the matrix of T with respect to the basis
2B14 Tensors by Transformation laws (cont.) The components transform as follows: