Download

1 / 21
210 likes | 387 Views
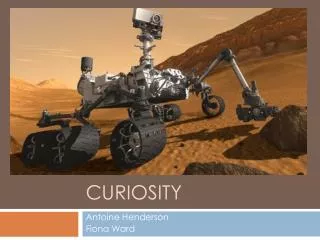
First Data from DAN Instrument onboard MSL Curiosity Rover. M. Litvak and I. Mitrofanov. Russian Space Research Institute (IKI RAN). Dynamic Albedo of Neutrons (DAN).

E N D
First Data from DAN Instrument onboard MSL Curiosity Rover M. Litvak and I. Mitrofanov Russian Space Research Institute (IKI RAN)
Dynamic Albedo of Neutrons (DAN) The Dynamic Albedo of Neutrons (DAN) is an active/passive neutron spectrometer that measures the abundance and depth distribution of H- and OH-bearing materials (e.g., adsorbed water, hydrated minerals) in a shallow layer (~1 m) of Mars' subsurface along the path of the MSL rover. DAN DE: Two detectors of neutrons with and without enclosure of Cd for detection of thermal and epithermal neutrons. DAN PNG: Pulsing Neutron Generator (DAN/PNG), which emits pulses of 107 neutrons at 14 MeV with duration of 1-2 microseconds
DAN Accommodation on the MSL DAN DE DAN PNG HEND Workshop 2012 June 18-22, 2012
DAN Science Large albedo flux of thermal neutrons Small albedo flux of thermal neutrons HEND Workshop 2012 June 18-22, 2012
Neutron pulse: 14 MeV neutrons Schematic of DAN active measurements Thermal neutrons from soil: position, width, amplitude depend on the soil composition and especially on H depth distribution Microseconds after neutron pulse
Example of DAN measurements performed during ground field test CTN (bare proportional counter) Thermal neutrons CETN (proportional counter in Cd enclosure)
Example of DAN measurements from the field tests Soil with different water content DAN measurements
DAN operations on martian surface Analysis of selected sites Reconnaissance for water anomaly 5 Analysis of selected sites Active monitoring (water accuracy about 1 wt%, layering) (1, 3) Active analysis (water accuracy about 0.1 wt%, layering) (2, 4) Passive monitoring (water accuracy about few wt%, radiation environment) (5)
DAN Instrument Status • More than 60 sols on the surface, Both DAN/DE and DAN/PNG are healthy. • No major issues from start of surface observations, successful execution of all DAN sequences onboard MSL. • Cruise to Mars, March 2012 = First measurements onboard in Space (passive mode for 1 hour) • Sol 03 = First test of Passive mode on Mars surface • Sol 11 = First test of Active mode on Mars surface (DAN/PNG emit neutrons!) • Sol 14 = First night measurements in active mode • Sol 38 = First measurements during drive in Passive mode • Sol 41 = First measurements during drive in Active mode
High Energy Neutron Detector
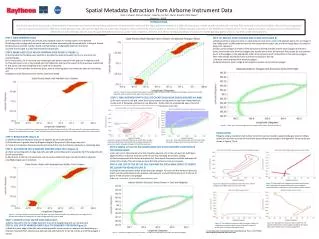
Example of of DAN Passive measurements on the Martian surface: The counting rates in CETN (in cadmium enclosure) and in CTN (without cadmium enclosure) are shown as measured during ~ 20 min drive of MSL rover for a distance about 30 m. The visible variations of counting rate are significant and may indicate variations of soil composition during the drive (H-content, or presence of absorbing elements like Fe or Cl)
Example of of DAN Active measurements on the Martian surface: Die-away curves measured as time profiles of counting rate in each DAN detector after PNG neutron pulse at two different locations. Difference between them indicate difference in soil composition. Two different locations are shown by red and blue colors CTN – DAN/DE detector without Cadmium enclosure sensitive both to epithermal and thermal neutrons CETN – DAN/DE detector in Cadmium enclosure sensitive to epithermal neutrons
Conclusions • According to data from HEND we have estimated average water distribution at the area around the landing place. The average water content in the area of the MSL landing is about 5-6 % but observations are made from the orbit (~450 km) and averaged across very huge surface area (~300 x 300 km). So we need ground truth from DAN on the surface! • We successfully started science operations with DAN instrument onboard MSL rover Curiosity. DAN successfully passed all surface aliveness tests and is ready for measurements both in passive and active mode (including short stops during rover driving). • First DAN measurements have shown high sensitivity both in passive and active modes. DAN has observed significant variability of the measured signal from one rover’s location to another one. It strongly indicates variations of soil composition along the rover’s drive. • Preliminary estimations have shown that variations of the water in the vicinity of landing site may be as large as 1-2%. Now we are in process to complete the procedure which will provide fast evaluation of absolute values of H abundance along the rover’s path.
Annex A DAN/DE Specifications
Annex B DAN/PNG Specifications