Download
1 / 56
660 likes | 1.59k Views
CURIOSITY ROVER – MARS EXPLORATION. Supervised By: Dr. Mohammad Zaki Kheder Done By: Mohammad Taiseer Khorma. SUBJECTS OUTLINE. INTRODUCTION. CURIOSITY ROVER. Overview of Curiosity rover trip dates, dimensions and cost Electrical Drive System: Motors Power Supply Gears

E N D
CURIOSITY ROVER – MARS EXPLORATION Supervised By: Dr. Mohammad Zaki Kheder Done By: Mohammad Taiseer Khorma
SUBJECTS OUTLINE INTRODUCTION CURIOSITY ROVER Overview of Curiosity rover trip dates, dimensions and cost Electrical Drive System: Motors Power Supply Gears Curiosity’s Computer Other parts and subsystems • MARS, The Red Planet • Why Exploring MARS? • MARS Exploration History • Why Rovers Not Astronauts?
INTRODUCTION • MARS, The Red Planet • Why Exploring MARS? • MARS Exploration History • Why Rovers Not Astronauts ?
MARS • Mars is the fourth planet from the Sun and the second smallest planet in the Solar System • It is often described as the "Red Planet", as the iron oxide prevalent on its surface gives it a reddish appearance • Mars is a terrestrial planet with a thin atmosphere • Mars has two moons, which are small and irregularly shaped • Mars can easily be seen from Earth with the naked eye
WHY EXPLORING MARS ? • The rotational period and seasonal cycles of Mars are likewise similar to those of Earth (Martian day about 24 hour and 35 min) • Exploring existence of life and it’s constituents, which include: • Searching of Water • Study Martian’s chemical elements and geology • Study the weather and radiation
MARS EXPLORATION HAS HISTORY • Since 1960, many exploration attempts took place • The attempts took several forms, like orbiters, Landers or rovers • They were total of 50 attempts, 21 of them succeed and the rest failed in lunching or landing (or orbiting) • Since 2004 up to now, three Rovers have reached MARS land, one of them breakdown and remaining two are still doing their jobs
WHY ROVERS NOT ASTRONAUTS ? • Although human are much more intelligent than robots, sending robots is better because: • Such trips are very dangerous to human • Sending rovers need lower cost because it doesn’t need food, water,… like human • Also there is no need to return the rover back to earth after finishing it’s jobs which eliminate the complexity and cost of back trip
CURIOSITY ROVER • Overview of Curiosity rover trip dates, dimensions and cost • Electrical Drive System: • Motors • Power Supply • Gears • Curiosity’s Computer • Other parts and subsystems
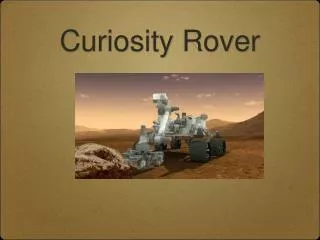
CURIOSITY ROVER The Curiosity rover is a car-sized robotic rover exploring Gale Crater on Mars as part of NASA's Mars Science Laboratory mission
CURIOSITY ROVER This rover is doing it’s jobs on Mars now It’s spacecraft has been lunched on November 26, 2011 It landed safely on August 5, 2012, after 560 million-km journey It took eight years of building and testing
MASS & DIMENSIONS Curiosity rover has a mass of 899 kg (1,980 lb) including 80 kg (180 lb) of scientific instruments The rover is 2.9 m (9.5 ft) long by 2.7 m (8.9 ft) wide by 2.2 m (7.2 ft) in height Wheel diameter: 0.5 meter (20 inches)
PROJECT COST Curiosity had a total cost of 2.5 billion dollars 820 million dollars were cost of building, launching, landing and operating the rovers on the surface for the initial 90-Martian-day 7000 people work on Curiosity at various times over the last eight years
ELECTRICAL DRIVE SYSTEM • Motors: 43 DC motors are used, part of them are Brushless DC motors (ECM motors) • Power Supply: Multi-Mission Radioisotope Thermoelectric Generator (Nuclear Generator) supplying two rechargeable Batteries • Gears: Harmonic Drive system
MOTORS IN CURIOSITY • Most of space rovers (including Curiosity) use Maxon motors, because of their enhanced features: • Small size (diameters of 20mm and 25mm ) • Can withstand temperatures between -120 and +25 Celsius • High efficiency up to 90%
MOTORS IN CURIOSITY • But that performance has a price, with Maxon motors costing up to five times that of conventional motors. • In Curiosity, the motors are used for driving the robotic arms, rock drilling, the steering mechanism, controlling the cameras and for the six high-tech wheels that drive the heavy rovers, each weighing nearly 180 kilos.
Brushless DC Motor ECM Motor • Using Programmable Controller include features like data communications, constant volume control, variable speed • ECM motors are very high efficiency 65% to 80% (without heat losses in rheostat speed controller) which means that the motors run “cool”, and also typically translates in reduced operation at the compressor level, which allows further energy savings. • have longer design life and require less maintenance • ECM motors are more expensive than traditional inefficient motors Electronically commutated (ECM) motors are brushless DC motors where the direction of the electric current is switched using electronic controllers.ECM motors provide the advantages of brushed DC motors in terms of the ability to have variable speed control, but without the drawbacks of brushes.ECM motors have longer lives than other types, the reason of using them in Curiosity.
Multi-Mission Radioisotope Thermoelectric Generator • RTGs can provide continuous power for twenty-plus years, in a safe and reliable manner, the reason of using it on Curiosity. • RTGs work by converting heat from the natural decay of radioisotope materials into electricity. • RTGs consist of two major elements: • Heat source • Thermocouples
Multi-Mission Radioisotope Thermoelectric Generator Plutonium – 238 Thermocouple Convert thermal power to electrical power. Consist of two dissimilar, electrically conductive materials which are joined in a closed circuit and the two junctions are kept at different temperatures (Seebeck effect) • A radioisotope material with unstable nucleus atoms resulting in the emission of gamma ray and heat
MMRTG IN CURIOSITY • Curiosity's RTG is fueled by 4.8 kg of plutonium-238 dioxide • It is designed to produce 125 watts of electrical power from about 2000 watts of thermal power at the start of the mission, and less power over time as its plutonium fuel decays (at it’s minimum lifetime of 14 years, electrical power output is down to 100 watts) • Unfortunately, thermoelectric generators are notoriously inefficient as their efficiency level is about 6.2%. • However, MMRTG produces much more than the solar panels of the previous Mars Exploration Rovers
MMRTG IN CURIOSITY • MMRTG consist of eight General Purpose Heat Source (GPHS) modules. • Each GPHS module with plutonium-238 dioxide will provide approximately 250 watts of thermal power. • Several layers of protective material designed to contain the plutonium-238 fuel
MMRTG IN CURIOSITY • The thermocouples in RTGs use heat from the GPHS to heat the hot junction of the thermocouple, and use the cold of outer space to produce a low temperature at the cold junction of the thermocouple • The electrical output from the MMRTG charges two rechargeable lithium-ion batteries. This enables the power subsystem to meet peak power demands of rover activities when the demand temporarily exceeds the generator’s steady output level. Each battery has a capacity of about 42 amp-hours
GEARS IN CURIOSITY • Harmonic drive gears used in Curiosity to enjoy they improved characteristics over traditional gears • Harmonic drives are ideally suited for use when high precision actuator operation is required. Additionally, harmonic drives provide a very high degree of repeatability of movement, since it has zero freeplay or backlash • Harmonic Drive which was developed to take advantage of the elastic dynamics of metal -- is generally made up of just three components: a wave generator, a flexspline and a circular spline
HARMONIC DRIVES The wave generator is a component having small ball bearings built into the outer circumference of the elliptical cam. The inside raceway of the bearings is fixed to the cam while the outer raceway is subjected to elastic deformation via the ball bearings. The wave generator is usually attached to the input shaft The flexpline is a thin cup-shaped metal rim component with external teeth. The bottom of the flexspline (cup bottom) is called the diaphragm. The diaphragm is usually attached to the output shaft The circular spline is a rigid steel ring with internal teeth. The circular spline has two teeth more than the flexpline and is usually fixed to a casing
HARMONIC DRIVES When the wave generator is rotated clockwise with the circular spline fixed, the flexspline is subjected to elastic deformation and its tooth engagement position moves by turns relative to the circular spline. The flexspline is deflected by the wave generator into an elliptical shape causing the flexspline teeth to engage with those of the circular spline at the major axis of the wave generator ellipse, with the teeth completely disengaged across the minor axis of the ellipse. When the wave generator rotates 180 degrees clockwise, the flexspline moves counterclockwise by one tooth relative to the circular spline. When the wave generator rotates one revolution clockwise (360 degrees), the flexspline moves counterclockwise by two teeth relative to the circular spline because the flexspline has two fewer teeth than the circular spline.
HARMONIC DRIVES Characteristics of Harmonic drives: 4. Small numbers of components and ease of assembly 5. Small-sized and lightweight 6. High torque capacity 7. High efficiency 8. Quiet, vibration-free operation • High-speed reduction ratio with single-stage coaxial provides high efficiency gearing without using complex mechanisms and structures. 2. Free of backlash (lost motion) 3. High precision
CURIOSITY’S BRAIN • At the heart of Curiosity there is, of course, a Computer • Designed for autonomous rover • Hardware: • Two identical RAD750 board one of them is backup • Each computer's memory includes 256 kB of EEPROM, 256 MB of DRAM, and 2 GB of flash memory • 200MHz CPU, capable of up to 400 MIPS
CURIOSITY’S BRAIN • Software: • VxWorks operating system • 27-year-old but developed yearly • Why does Curiosity use it? It’s reliable, has a mature development toolchain, and presumably its low-level scheduling and interrupt systems are ideal for handling real-time tasks like EDL (entry, descent, and landing; aka, seven minutes of terror). • Functioning code: • Language C is used • It's 3.5 million lines of code • much of it autogenerated by simulation programs but over a million lines were hand coded • The code is implemented as 150 separate modules • All activities are controlled by this computer, like: self-monitoring, taking pictures, driving, navigation, and other operation.
CURIOSITY’S BRAIN • On Mars, very high level of radiation and very low level of temperature take place, which can not be withstood by traditional processors • In fact, Curiosity’s computer is virtually impervious to massive amounts of radiation and other environmental extremes. • The immunity of processor of radiation put a strict limitation on it’s capabilities and performance, the reason behind that Curiosity’s processor has abilities 10 times less than a smart phone nowadays! • Therefore, a software update has done after the landing on Mars flushing out the no-longer-needed entry, descent and landing application and replacing them with software optimized for surface operations
OTHER PARTS AND SUBSYSTEMS Curiosity is quite literally a science lab on wheels! Radiation Assessment Detector (RAD) Mars Hand Lens Imager (MAHLI) Alpha Particle X-ray Spectrometer (APXS) Chemistry and Mineralogy (CheMin) Sample Analysis at Mars (SAM) Mars Descent Imager (MARDI) • Mobility Systems • Heat Rejection System • Communication System • Robotic Arm • Mast Camera (MastCam) • Chemistry and Camera complex (ChemCam) • Navigation Cameras (Navcams) • Hazard Avoidance Cameras (Hazcams)
Mobility Systems • Curiosity is equipped with six 50 cm diameter wheels in a rocker-bogie suspension • Legs made of titanium tubing • Wheels made of aluminum, with cleats for traction • It can travel up to 90 meters (295 feet) per hour but average speed is about 30 meters per hour
Mobility Systems • This steering capability allows the vehicle to turn in place, a full 360 degrees • The rover is capable of climbing sand dunes with slopes up to 12.5 degrees • Based on the center of mass, the vehicle can withstand a tilt of at least 50 degrees in any direction without overturning • Curiosity will be able to roll over obstacles approaching 65 cm (26 in) in height • It can travel up to 90 meters (295 feet) per hour but average speed is about 30 meters per hour
Mobility Systems • This mobility system requires that each wheel be driven by a separate motor and steering mechanism (independently actuated and geared) increasing the overall complexity. • Rovers that use the rocker bogie suspension can have 10 or 12 motors just for mobility • Harmonic drives coupled to the motors are used to increase torque capacity and save space and weight
Heat Rejection System • The temperatures at the landing site can vary from -127 to 40 °C • HRS controls temperature so that sensitive components are kept at optimal temperatures • The thermal system will achieve this by gathering waste heat from the power source and dissipation of internal components to heat fluid in body tubes • The fluid pumped through 60 m (200 ft) of tubing in the rover body in a measured way to get specific temperature • The HRS also has the ability to cool components if necessary
Communication System • Curiosity is equipped with significant telecommunication redundancy by several means - it can communicate directly with Earth, or using UHF for communicating with Mars orbiters. • Communication with orbiters is expected to be the main path for data return to Earth, since the orbiters have both more power and larger antennas than the rover allowing for faster transmission speeds • An average of 14 minutes, 6 seconds will be required for signals to travel between Earth and Mars. • Curiosity can communicate with Earth directly at speeds up to 32 kbit/s
Robotic Arm • The rover has a 2.1 m long arm with holding five devices that can spin through a 350-degree • The arm makes use of three joints to extend it forward and to stow it again while driving • It has a mass of 30 kg and its diameter is about 60 cm • Two of the five devices are contact instruments known as the X-ray spectrometer (APXS), and the Mars Hand Lens Imager (MAHLI camera) • The remaining three are associated with sample acquisition and sample preparation functions: a percussion drill, a brush, and mechanisms for scooping, sieving and portioning samples of powdered rock and soil • The diameter of the hole in a rock after drilling is 1.6 cm and up to 5 cm deep • The drill carries two spare bits
Mast Camera (MastCam) • The MastCam system provides multiple spectra and true-color imaging with two cameras • The cameras can take true-color images at 1600×1200 pixels and up to 10 fps and video at 720p (1280×720) • Each camera has 8 GB of flash memory, which is capable of storing over 5,500 raw images, and can apply real time lossless data compression • The cameras have an autofocus capability that allows them to focus on objects from 2.1 m (6 ft 11 in) to infinity
Chemistry and Camera complex • ChemCam is a suite of remote sensing instruments, it’s actually two different instruments combined as one: a laser-induced breakdown spectroscopy (LIBS) and a Remote Micro Imager (RMI) telescope. • The purpose of the LIBS instrument is to provide elemental compositions of rock and soil, while the RMI will give ChemCam scientists high-resolution images of the sampling areas of the rocks and soil that LIBS targets • The LIBS instrument can target a rock or soil sample from up to 7 meters away
Navigation Cameras (Navcams) • The rover has two pairs of black and white navigation cameras mounted on the mast to support ground navigation • The cameras have a 45 degree angle of view and use visible light to capture stereoscopic 3-D imagery • These cameras support use of the ICER image compression format.
Hazard Avoidance Cameras • The rover has four pairs of black and white navigation cameras called Hazcams—two pairs in the front and two pairs in the back • They are used for autonomous hazard avoidance during rover drives and for safe positioning of the robotic arm on rocks and soils • The cameras use visible light to capture stereoscopic three-dimensional (3-D) imagery • The cameras have a 120 degree field of view and map the terrain at up to 3 m in front of the rover • This imagery safeguards against the rover crashing into unexpected obstacles, and works in tandem with software that allows the rover to make its own safety choices
Radiation Assessment Detector • This instrument was the first of ten instruments to be turned on. Its first role was to characterize the broad spectrum of radiation environment • RAD main purpose is to determine the viability and shielding needs for potential human explorers. Its second role is to characterize the radiation environment on the surface of Mars, which it started doing immediately after landing
Mars Hand Lens Imager (MAHLI) • "Magnifying Eye“, much like a geologist's hand lens, this camera provides close-up views of minerals, textures, and structures in Martian rocks at scales smaller than the diameter of a human hair • That information will help us understand if any rocks formed in water, which is necessary to life as we know it. It will help scientists select which rocks may be the best to study further--that is, rocks and minerals that may contain signs of organics, the chemical building blocks of life. • With two white LED lights, it can take pictures at night, and with ultraviolet (UV) LEDs, can look for minerals that fluoresce • It can also send high-definition video back to Earth and even be used to look back to take a self-portrait of Curiosity.
Alpha Particle X-ray Spectrometer • This tool helps identify the chemical elements in rocks and soil and tells us how much of each is present • Identifying the elemental composition of lighter elements (sodium, magnesium or aluminum) and heavier elements (iron, nickel or zinc) helps scientists identify main materials in the Martian crust • This information helps scientists select rock and "soil" samples, characterize the interiors of the rocks following brushing, and then determine how the material formed long ago and if it was later altered by wind, water, or ice. All previous rovers have carried a tool like this one, so comparisons of landing sites can be made to understand the history of Mars even better
Chemistry and Mineralogy • Finding minerals that either formed in water or were altered by water in the past helps us understand if Mars ever could have been a habitat for microbes • This tool is one of two instruments that studies powdered rock and soil samples scooped up by the robotic arm • Curiosity uses it to tell us what kinds of minerals are in samples and how much of them are there • Minerals provide a record of what happened in the past • Different minerals are linked to certain kinds of environments.
Sample Analysis at Mars (SAM) • Curiosity uses this tool to search for organics, carbon-based molecules that are the chemical building blocks of life • Finding organics is important in the search for Martian environments capable of supporting microbes, because life as we know it cannot exist without them (though they can exist without life) • This tool allows Curiosity to detect lower concentrations of a wider variety of organic molecules than any other instrument yet sent to Mars. It is one of two instruments that study powdered rock and soil samples scooped up by the robotic arm • Curiosity will deliver powdered samples to one of two funnels on the rover deck ("back") and then to small cups for processing inside the rover's "body." Finding evidence that Gale Crater had both past water and organics would suggest it might have been hospitable to life