Download
1 / 26
260 likes | 279 Views
Explore micro and macro flexures in optics, focusing on precision mechanisms, symmetry, and degree of freedom. Learn about applications, such as tip-tilt mirrors, Comb drive, and MEMS devices, along with techniques like piezoelectric and capacitive driving mechanisms. Understand the importance of symmetry in minimizing parasitic motion and achieving nanometer precision. Discover various flexure designs for translation, rotation, and multi-DOF configurations, with insights on dynamic range and linearity. References included.

E N D
Outline • Brief overviews of micro flexures • Focus on macro flexures in this tutorial • Beam bending • Symmetry -> precision • Degree of freedom (DOF) • Applications
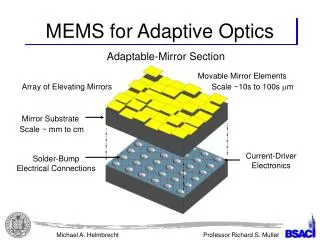
Micro Flexures Tip-tilt mirrors discrete vs analog Comb drive
Optical MEMS devices Resonant frequency of the comb drive depends on the ions hitting the pads Analog tip-tilt mirror
Motivation • Need nanometer precision to manipulate light. • “Stage” and “driving mechanism”. • Sticktion is a problem encountered with screw-type driving mechanisms. • Use piezoelectric, capacitive, magnetic, photon,… to drive the “stage”.
Symmetry in 2D • In-plane rotation • Parasitic motion not di-coupled • As soon as the stage moved, Fx developed some “local” y component • In-plane rotation minimized • Parasitic motion reduced or cancelled • Less cross-talk
Parallelogram • In-plane rotation constrained • Parasitic motion reduced • As soon as the stage moved, Fx developed some “local” y component • In-plane rotation constrained • Parasitic motion further reduced or cancelled • Less cross-talk
Deformation Diagram X/Y forces + X/Y moments
5 DOF – Pentaflex • Combination of vertical and horizontal blades • X/Y/Z translation + X/Y rotation
Highly Symmetric XY Stages Can be made into XYZ stages by adding the horizontal blades like Pentaflex Three different anchoring geometries
Diaphragm Flexures Provide out-of-plane (z,f,g) motions Constrain the other in-plane (x,y,q) motions (Voice-coil, pressure sensor, flow control, MEMS devices)
6-axis (nano) Flexures mHexFlex
q Flexures Only allows q DOF, all others conflict.
Tip-tilt Flexures Remove axial misalignment between two parts (shear), but does not remove torque/moment.
In-plane 1D Flexure In-plane 1D flexure Symmetric dual 4-bar linkage eliminates dY errror Out-of-plane 1D flexure
XYZ Translation Stage Conflict for all qfg DOF’s
Bi-stable Flexure Actuation force causes deflection Open/close a valve at some pressure threshold; on/off Have negative stiffness in the unstable region
Non-linear Spring Constant Shape -> deflection -> variable stiffness
Physik Instrument Piezoelectric drive + capacitive sensor, feedback loop to actively take out platform vibrations
Conclusion • Use flexure to avoid sticksion. • Use symmetry to cancel/de-couple motions. • In-plane vs out-of-plane configurations • Flexures for translation, rotation, and any combination of DOF (1-6 DOF). • Dynamic range and linearity. • Soft flexure -> low resonant frequency, stiff flexure -> high actuation force. • References: see FlexureForOptics.doc