Download

1 / 24
240 likes | 251 Views
CATSAT Team from Spain's Universidad Politécnica de Madrid participated in the 2010 CanSat Competition. Their mission included detecting physics variables, verifying microgravity, and designing electronic devices for rockets. The team utilized various sensors and components like accelerometers, pressure sensors, and GPS modules. Their CanSat's flight data included temperature, barometric measurements, GPS coordinates, and more. They also detailed the components of their electronic and programming systems, parachute system, structure subsystem, and recovery subsystem. The total budget of their mission was 215€.

E N D
Cansat Competition 2010: Team: CATSAT TEAM (Students) Country: Spain University: Universidad Politécnica de Madrid Escuela Técnica Superior Ingenieros Aeronáuticos Category: Experimental-Cansat Size: Cansat Size Team leader: Miguel Ángel de Frutos Carro Team members: Almudena Buelta Management and Administration Alejandro Bujarrabal Data Analysis and Structure Carlos Freire Structure and Treasury Juan Fernández Parachute system Miguel Ángel de Frutos Electronics and Programming
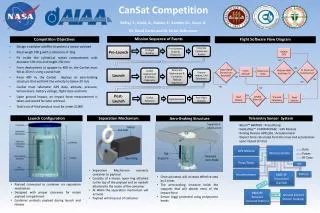
Cansat Mission: • Detection, measurement and registration of different physics variables. • Verification of the existence of useful microgravity. • Design a modular electronic device which can be used in futures amateur rockets • Practical realization of a recovery system which allow us a controlled opening.
Flight Data: • Outside temperature. • Barometer. • Barometer altimetry. • Acceleration in 3 axis. • Speed on 3 axiss. • Space travelled in 3 axis. • Microgravity. • GPS coordinates. • GPS height. • GPS speed. • GPS heading. • Event detection: take off rocket exit
Electronic and Programming : Accelerometer G-Switch Pressure Sensor Microcontroller BS2 EEPROM 256k TemperatureSensor Voltage Regulator
Electronic and Programming : Acelerometer GPS Module
Microcontroller: BS2 • Processor Speed: 20 MHz Turbo. • Program Execution Speed: ~ 12.000 RAM Size: 38 Bytes (12 I / 0, 26 Variable). • Scratch Pad RAM: 128 bytes. • EEPROM (Program) Size: 8 x 2 KBytes, ~ 4,000 PBASIC instructions. • Number of I / O Pins: 16 + 2 Dedicated Serial. • Current Draw @ 5 VDC: 40 mA Run, 350 uA Sleep. • Source / Sink Current per I / O: 30 mA / 30 mA. • PBASIC Commands: 61. • Package: 24-pin DIP.
Pressure Sensor: Motorola MPX 4115th This sensor is an integrated circuit capable of measuring absolute pressure through a membrane system. It produce an output voltage proportional to 0.204 to 4.794V. • Temperature Sensor: Dallas DS1620 • The DS1620 is an integrated circuit that works as a digital thermometer and uses a SPI communication to communicate with the microcontroller. • EEPROM: Microchip 25LC256 SPI (256K) • EEPROM stands for Electrically-Erasable Programmable Read-Only Memory (electrically erasable and programmable ROM). It has a capacity of 32768 bits organized in 8-bit addresses. • 3-axis accelerometer Hitachi H48c • The 3-axis accelerometer Hitachi H48c is an integrated device type MEMS capable of measuring gravitational forces (g) on 3 axes, ranging from 0 to ± 3g • A G-Switch is a switch whose state depends on the acceleration forces. • GPS: Parallax receiver Module The Parallax Global Positioning System (GPS) Receiver Module is a fully integrated, low-cost unit completed with an on-board patch antenna.
Cansat Device Flight Data Analysis: EEPROM FULL EXCELDIRECTLY EXCEL SpreedSheet GRAPHiCS • GPS Track on Google Earth • Data table • Graphics and Diagrams Google Earth
Structure subsystem Objetives: • Protect the electronics and support the parachute • Desing an fiberglass structure. • Minimizate the aerodinamical drag
Structure subsystem Desing: • Fiberglass • Two parts • Sizes: long = 11.5 cm radio = 3.3 cm
Structure subsystem Construction process: • Plaster mold
Structure subsystem Fiberglass and Epoxi resin
Structure subsystem Sand and paint
Recovery subsystem Objectives: • To desing a parachute acording to the weight of the cansat. • To esing an aperture sytem. • Recover the cansat safely.
Recovery subsystem Our parachute desing: • Made of Nylon. • Spherical shape. • Size: R = 0,375 m • Braided Nylon threads, 1 meters long
Recovery subsystem • Parachute construction: • Cut 8 isosceles triangles of Nylon • Sewn the triangles • Make 8 holes for the threads • Make a hole in the center
Recovery subsystem Parachute bending: • Fold in a half the parachute, keeping the thread taut. • Hold the centre of the parachute,and bend small triangles, from the ends toward the center. • From the far end of the threads start to wind the parachute and then continue rolling the threads. • Anchor the last thread to the structure of the cansat.
Budget of the mission: • Electronic Subsystem……………………………………..TOTAL: 190€ • Structure Subsystem………………………………………..TOTAL: 19€ • Parachute and Recovery subsystem……………….TOTAL: 6€ TOTAL: 215€
Yeahhh!!..Also in our WEBSITE!! Free Project Downloading: Sketches, codes, schematics .. http://sites.google.com/site/catsatteam/