Download
1 / 22
340 likes | 696 Views
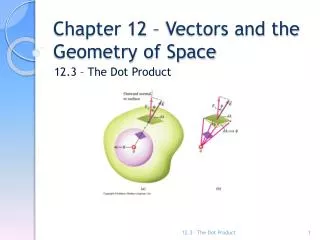
Chapter 12 – Vectors and the Geometry of Space. 12.5 Equations of Lines and Planes. Objectives: Find vector, parametric, and general forms of equations of lines and planes. Find distances and angles between lines and planes . Lines in 2D.

E N D
Chapter 12 – Vectors and the Geometry of Space 12.5 Equations of Lines and Planes • Objectives: • Find vector, parametric, and general forms of equations of lines and planes. • Find distances and angles between lines and planes 12.5 Equations of Lines and Planes
Lines in 2D • A line in the xy-plane is determined when a point on the line and the direction of the line (its slope or angle of inclination) are given. 12.5 Equations of Lines and Planes
Lines in 3D • A line L in 3D space is determined when we know: • A point P0(x0, y0, z0) on L • The direction of L, given by a vector 12.5 Equations of Lines and Planes
Definition – Vector Equation So, we let v be a vector parallel to L. • Let P(x, y, z) be an arbitrary point on L. • Letr0 and r be the position vectors of P0 and P. • If a is the vector with representation from P to Po. Then the Triangle Law for vector addition gives r = r0 + a. However, since a and v are parallel vectors, there is a scalar t such that a = tv. So we have This is a vector equation of L. r = r0 + tv 1 12.5 Equations of Lines and Planes
Definition continued We can also write this definition in component form: r = <x, y, z> and r0 = <x0, y0, z0> • So, vector Equation 1 becomes: <x, y, z> = <x0 + ta, y0 + tb, z0 + tc> 2 Positive values of t correspond to points on L that lie on one side of P0. Negative values correspond to points that lie on the other side. 12.5 Equations of Lines and Planes
Definition continued • Two vectors are equal if and only if corresponding components are equal. • Hence, we have the following three scalar equations. x = x0 + at y = y0 + bt z = z0 + ct, where tℝ • These equations are called parametric equations of the line L through the point P0(x0, y0, z0) and parallel to the vector v = <a, b, c>. • Each value of the parameter t gives a point (x, y, z) on L. 12.5 Equations of Lines and Planes
Example 1 – pg 824 #2 • Find a vector equation and parametric equations for the line. The line through the point (6,-5,2) and parallel to the vector <1,3,-2/3>. 12.5 Equations of Lines and Planes
Definition - Symmetric Equations • If we solve the equations for t x = x0 + at, y = y0 + bt, z = z0 + ct, we get the following symmetric equations. 3 12.5 Equations of Lines and Planes
Example 2 • Find parametric equations and symmetric equations for the line. The line through the points (6,1,-3) and (2,4,5). 12.5 Equations of Lines and Planes
Equations of Line Segments • The line segment from r0 to r1 is given by the vector equation where 0 ≤ t ≤ 1 r(t) = (1 – t)r0 + tr1 4 12.5 Equations of Lines and Planes
Definition – Skew Lines • Lines that are skew are not parallel and do NOT intersect. They do NOT lie in the same plane. 12.5 Equations of Lines and Planes
Example 3 • Determine whether the lines L1 and L2 are parallel, skew, or intersecting. If they intersect, find the point of intersection. 12.5 Equations of Lines and Planes
Planes • A plane in space is determined by: • A point P0(x0, y0, z0) in the plane • A vector n that is orthogonal to the plane 12.5 Equations of Lines and Planes
Definition – Normal Vector • This orthogonal vector n is called a normal vector. • The normal vector n is orthogonal to every vector in the given plane. • In particular, n is orthogonal to r – r0. 12.5 Equations of Lines and Planes
Equation of Planes • If n is orthogonal to r – r0 we have the following equations: • Either Equation 5 or Equation 6 is called a vector equation of the plane. 12.5 Equations of Lines and Planes
Equations of Planes • This equation is the scalar equation of the plane through P0(x0, y0, z0) with normal vector n = <a, b, c>. 12.5 Equations of Lines and Planes
Linear Equation where d = –(ax0 + by0 + cz0) • This is called a linear equation in x, y, and z. 12.5 Equations of Lines and Planes
Example 4 – pg. 825 # 34 • Find an equation of the plane. The plane that passes through the point (1,2,3) and contains the line x = 3t, y = 1 + t, z = 2 – t. 12.5 Equations of Lines and Planes
Example 5 – pg. 825 # 45 • Find the point at which the line intersects the given plane. x = 3 – t y = 2 + t z = 5t x – y + 2z = 9 12.5 Equations of Lines and Planes
Example 6 – pg. 825 #48 • Where does the line through (1,0,1) and (4, -2, 2) intersect the plane x + y + z = 6? 12.5 Equations of Lines and Planes
More Examples The video examples below are from section 12.5 in your textbook. Please watch them on your own time for extra instruction. Each video is about 2 minutes in length. • Example 3 • Example 4 • Example 7 12.5 Equations of Lines and Planes
Demonstrations Feel free to explore these demonstrations below. • Constructing Vector Geometry Solutions 12.5 Equations of Lines and Planes