Download
1 / 45
450 likes | 465 Views
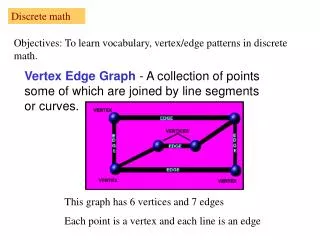
Discrete Math II. Howon Kim 2018. 12. Agenda. 11.1 Definitions 11.2 Subgraphs, Complements, & Graph Isomorphism 11.3 Vertex Degree: Euler Trails & Circuits 11.4 Planar Graphs Next…. Review: Theorem 11.2. e 6. e 2. a. c. e. e 1. e 4. b. e 5. e 3. d. e 7.

E N D
Discrete Math II Howon Kim 2018. 12.
Agenda • 11.1 Definitions • 11.2 Subgraphs, Complements, & Graph Isomorphism • 11.3 Vertex Degree: Euler Trails & Circuits • 11.4 Planar Graphs • Next…
Review: Theorem 11.2 e6 e2 a c e e1 e4 b e5 e3 d e7 • Total sum of degrees If G=(V,E) is an undirected graph or multigraph, then • Proof :As we consider each edge {a,b} in graph G, we find that the edge contributes a count of 1 to each of deg(a), deg(b), and consequently a count of 2 to . Thus accounts for deg(v) deg(a) = 3 deg(b) = 3 deg(c) = 1 deg(d) = 2 deg(e) = 5 --------------2 x# of edges 14= 2|E|
Review • Corollary 11.1 For any undirected graph or multigraph, # of vertices of odd degree must beeven. ( Proof ) The total sum of degrees is even since 2|E|. Two kinds of vertices Even degree : deg(veven)should be even number Odd degree : deg(vodd)should be even number Therefore, the number of odd degree vertices must be even.
Review: Euler Circuit a c b d Let Gan undirected graph with no isolated vertices. • Euler circuit a circuit in G that traversesevery edge of G exactly once • Euler trail an open trail from a vertex to another vertex in G, which traverses each edge in G exactly once
Review: • Existence of Euler circuit Let G=(V,E) is an undirected graph with no isolated vertices. Ghas an Euler circuit. G is connected and every vertex in G has even degree. • Existence of Euler trail If G=(V,E) is an undirected graph with no isolated vertices, then we can construct an Euler trail. G is connected and exactly two vertices of odd degrees
Review: Isomorphism(동형) • Graph Isomorphism Let G1=(V1, E1) and G2=(V2, E2) be two graphs. A function f : V1 V2 is called a graph isomorphism if (a)f is one-to-one and onto and (전단사) (b) for all a,b V1, {a,b}E1{f(a), f(b)} E2 When such a function exists,G1 and G2 are called isomorphic graphs. In Greek: ison : “equal” Morphe “shape”
Review: k-regular graph • A graph is regular if every vertex is of the same degree • It is k-regular if every vertex is of degree k • Is it possible to have a 4-regular graph with 10 edges ? • From theorem 11.2, Two nonisomorphic 4-regular graphs
Planar Graphs • Definition A graph G is called planar if G can be drawn in the plane with its edges intersecting only at vertices ofG. Such a drawing of Gis called an embedding of G in the plane. • That is, • planar is the property of a graph that it can be drawn in the plane without crossings • A graph embedding (or imbedding) is a drawing with no crossings at all.
Examples K2 K5 K4 K1 K5 K3 embedding Planar Graphs Non-planar Graph K5
Examples Planar Graphs
Bipartite Graphs Isomorphic 00 00 01 01 V2 V1 11 10 11 10 • Definition A graph G = (V,E)is called bipartite, if V = V1V2 with V1V2 = , and every edge of Gis of the form {a, b}with a V1 and b V2. 각각 서로 다른 vertex set 간에만 edge가 존재함
An Example Bipartite Graphs
Bipartite Graphs • That is, • A graph is bipartite if its vertices can be partitioned into two subsets (the parts, or partite sets) so that no two vertices in the same part are adjacent. • A graph whose vertices can be divided into two disjoint sets U and V such that every edge connects a vertex in U to one in V; that is, U and V are independent sets [wikipedia]
An Example Hypercube Q3 Isomorphic 000 001 001 000 011 010 011 010 100 101 100 101 110 111 110 111 V1 V2
Complete Bipartite Graphs K3,3 K2,3 9 edges • Km,n If each vertex in V1 is joined with every vertex in V2, we have a complete bipartite graph. If |V1| = m, |V2| = n, the graph is denoted by Km,n. • That is, • complete bipartite graph is a bipartite graph Km,n whose vertex set has two parts of sizes m and n, respectively, such that every vertex in one part is adjacent to every vertex in the other part.
Non-planar Graph K3,3 Isomorphic K3,3
Subdivision u u u x e e c c e c v v w w w d d d A graph G = (V,E)be a loop-free undirected graph. An elementary subdivisionof G results when an edge e = {u, w} is removed from Gand then the edges {u, v}, {v, w} are added to G-e where v V. G-e: unchanged vertex set, spanning tree
Subdivision • That is, • subdivision (of an edge) is the operation of inserting a new vertex into the interior of the edge, thereby splitting it into two edges • For example, the edge e, with endpoints {u,v} can be subdivided into two edges, e1 and e2, connecting to a new vertex w
Homeomorpic w a a a y e e c c c z e v b b b d d d The loop-free undirected graphs G1 = (V1, E1)and G2 = (V2, E2)are called homeomorphic, if (a) they are isomorphic or (b)they can both be obtained from the same loop-free undirected graph Hby a sequence of elementary subdivisions. These are homeomorphic By elementary subdivision H
Example http://en.wikipedia.org/wiki/Homeomorphism_(graph_theory) • In other words, G and H are homeomorphic if there is an isomorphic from some subdivision of G (that is, G’) to some subdivision of H (that is, H’) G and H are homeomorphic H G By elementary subdivision By elementary subdivision G’, H’ are isomorphic • If G' is the graph created by subdivision of the outer edges of G and H' is the graph created by subdivision of the inner edge of H, then G' and H' have a similar graph drawing. • Therefore, there exists an isomorphism between G' and H', meaning G and H are homeomorphic.
Example G and H are homeomorphic H G By elementary subdivision By elementary subdivision H and H’ are homeomorphic G’ and H’ are isomorphic G and G’ are homeomorphic H’ G’ In Greek: homeo (homoios): “similar” Morphe “shape”
Example G1 is obtained from G by means of one elementary subdivision G2 is obtained from G by two elementary subdivisions G1 and G2 are homeomorphic to G G3 is obtained form G by four elementary subdivisions. Also, G3 can be obtained from G1 & G2. (G3 is homeomorphic to G, G1 & G2)
Example a a e c c e b b d d Homeomorphic graphs may be isomorphic except, possibly, for vertices of degree 2. In particular, if two graphs are homeomorphic, they are either both planar or both nonplanar. K5 v y z w
Theorem 11.5 : Kuratowski’s Thm. h h a a g g c e e f f i i j j c b b d d A graph is nonplanarif and only if it contains a subgraph that is homeomorphic to eitherK5or K3,3. Isomorphic (b) Subgraph of the Petersen graph that is homeomorphic to K3,3) (a) Petersen graph • * Subgraph If G=(V,E) is a graph, then G1=(V1, E1) is called a subgraphof G if V1 Vand E1 Ewhere each edge in E1is incident with vertices in V1. cf) spanning subgraph * Homeomorphic :
Theorem 11.5 : Kuratowski’s Thm. h h g h a a a g g e e e c f f f i i j j j c b b b d d d K3,3에 homeomorphic한 graph G’ G’ G i 붉은색 edge를 지우면 G’이 됨. 즉, G는 G’을 subgraph로 가짐 c Isomorphic Petersen graph
Regions R1 R1 Infinite region R3 R2 R4 R2 R3 R4 • Edge에 의하여 둘러싸인 영역 Embedded planar graph에서 정의 Any of the pieces of surface subtended by the graph (그래프에의해 범위가 정해진 영역) • A region of an imbedded graph is, informally, a piece of what results when the surface is cut open along all the edges. • From a formal topological viewpoint, it is a maximal subsurface containing no vertex and no part of any edge of the graph.
Regions R1 R1 Infinite region R3 R2 R4 R2 R3 R4 • Degree of region, deg(R) the number of edges in a (shortest) closed walk about the boundary of R
Examples R2 R3 R1 R3 R1 R2 R4 R5 R6 Even for a graph with loops and a multigraph
Theorem 11.6 R4 R1 R2 R3 • Euler’s formula(v – e + r = 2) Let G = (V,E)be a connected planar graph or multigraph with |V| = v and |E| = e. Letrbe the number of regions in the plane determined by a planar embedding of G. Then, v– e + r = 2. Euler’s formula ; v – e + r = 2 v = 5 e = 7 r = 4
Examples R2 R3 R1 R3 R1 R2 R4 R5 R6 Even for a graph with loops and a multigraph v – e + r = 2 v = 5 e = 6 r = 3 v – e + r = 2 v = 4 e = 8 r = 6
Examples v – e + r = 2 v = 1 e = 0 r = 1 v – e + r = 2 v = 1 e = 1 r = 2 v – e + r = 2 v = 2 e = 1 r = 1
Corollary 11.3 • Two Inequalities Let G = (V,E)be a loop-free connected planar graph with |V| = v and |E| = e > 2, andrregions. Then, 3r 2eand e 3v-6. (only ) • Proof Since each region contains at least three edges, Degree of each region 3 3r deg(Ri) =2e 3r 2e 2 = v – e + r v – e + (2/3) e = v – (1/3) e e 3v-6 r2 r1 그리고 region degree 수식 사용 최소 3개 이상의 edge로 만들어지는 region. 이때 당연히 degree는(각 region의 edge 개수)는 region * 3이 됨. 3r
Examples Let G = (V,E)be a loop-free connected planar graph with |V| = v and |E| = e > 2, andrregions. Then, 3r 2eand e 3v-6. By loop free Inequality holds. It is multigraph !! 3r 2e , r=2, e=3 e 3v-6, r=3, v=3
Examples K4 Inequality holds. 3r 2e e 3v-6 v = 4 e = 6 6 = 3v – 6 r = 4 e = 6 3r = 12 12 = 2e v = 8 e = 12 18 = 3v – 6 v = 5 e = 7 r = 4 e = 7 9 = 3v – 6 3r = 12 14 = 2e r = 6 e = 12 3r = 18 24 = 2e Inequality holds.
Is it planar ? We know that • Corollary 11.3 shows just anecessary conditionfor testing planarity of graphs 3r 2e e 3v-6 Planar graph Contrapositive Nonplanar Test How to test planarity ? To prove "If P, Then Q" by the method of contrapositive means to prove "If Not Q, Then Not P". Method of Contradiction: Assume P and Not Q and prove some sort of contradiction. Method of Contrapositive: Assume Not Q and prove Not P.
Nonplanar Test (e > 3v-6) K3,3 K5 Petersen graph 3r 2e e 3v-6 v = 6 e = 9 < 12 = 3v – 6 Not so good ! v = 10 e = 15 < 24 = 3v – 6 v = 5 e = 10 > 9 = 3v – 6
Planar or Nonplanar ? K2,3 Kuratowski’s theorem A graph is nonplanarif and only if it contains a subgraph that is homeomorphic to either K5 or K3,3. Is it planar or nonplanar ? v = 5 e = 6 < 9 = 3v – 6
Planarity Testing • There are many graphs which satisfy the inequalities but are not planar • Therefore, we need other way to decide the planarity • Observation 1 • Not all graphs are planar. • For example, we know K5 and K3,3 are not planar.
Planarity Testing • Observation 2 • If G is a planar graph, then every subgraph of G is planar; • We usually stated observation 2 as follows • Observation 2a • If G contains a nonplanar graph as a subgraph, then G is nonplanar. For example, following graph is nonplanar. • Since it contains K5 and K3,3 as a subgraph
Planarity Testing • Observation 3 • If G is a planar graph, then every subdivsion of G is planar, we usually stated observation 3 in the following way. • Observation 3a • If G is a subdivision of a non-planar graph, then G is non-planar. • For example, following graph is non-planar, • Since it contains K5 and K3,3 as a subgraph
More on Nonplanarity & Petersen Graph h h a a g g c e c e f f i i j j b b d d A graph is nonplanarif and only if it contains a subgraph that is homeomorphic to eitherK5or K3,3. (b) Subgraph of the Petersen graph that is homeomorphic to K3,3) (a) Petersen graph • Subgraph If G=(V,E) is a graph, then G1=(V1, E1) is called a subgraphof G if V1 Vand E1 Ewhere each edge in E1is incident with vertices in V1 • Homeomorphic isomorphic or can be obtained from elementary subdivisions.
More on Nonplanarity & Petersen Graph h a g c e f i j b d • Petersen graph is nonplanar. Any nonplanar graph has as minors either K5 or K3,3. • Petersen graph has K5and K3,3 as minors. • Minor: graph H is called a minor of the graph G if H is isomorphic to a graph that can be obtained by zero or more edge deletions or edge contractions on a subgraph of G. • Edge contraction is the process of removing an edge and combining its two endpoints into a single node. Ex of Minor) Petersen graph G H • Graph H is a minor of graph G • Construct a subgraph of G by eliminating the dashed-line • contract the gray edge (combining the two vertices it connects)
h h h a a g g g e c e c f f f i i i j j j b b d d More on Nonplanarity & Petersen Graph • Petersen graph has K5and K3,3 as minors. Edge contractions Petersen graph K5
More on Nonplanarity & Petersen Graph h a g e c f i j b d • Petersen graph has K5and K3,3as minors. c Edge deletions Isomorphic to K3,3 d e b b e i i h h c d Petersen graph Edge contractions a a Homeomorphic to K3,3 ! (by subdivision!) a subgraph f f f j j g g e e b b j g e b i i h h i h c c d d c d