Download
1 / 66
690 likes | 971 Views
Chapter 3: Fourier Representations for Signals (Part I). CPE200 Signals and Systems. Introduction. 3.1.

E N D
Chapter 3: Fourier Representations for Signals (Part I) CPE200 Signals and Systems
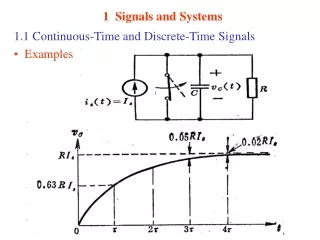
Introduction 3.1 A common engineeringanalysis technique is the partitioning of complex problems into a linear combination of the simpler ones. The simpler problems are then solved, and the total solution becomes the sum of the simpler solutions. Two requirements must be satisfied for a solution as described earlier to be both valid and useful. First, the problem must be linear, such that the solution for the complex problem is equal to the sum of the solutions considering only one simpler problem at a time. Next, the complex problem must be able to express as a number of simpler problems. Analysis techniques in signal and system theory follow the same manner mentioned above. A linear system will allow us to
determine the response of each individual input when the input is a combination of more than one signals. The only required procedure is how to decompose the complicated signal into a combination of simpler signals. Any signals can also be represented as a weighted superposition of complex sinusoids. From Chapter 2, we discovered that any signals can be represented as linear combinations of shifted impulses. When such a signal is applied to a linear time-invariant system, then the system response is based on the convolution sum. However, there is an alternative representation for signals and systems which will be discussed in this chapter and the following two chapters. The alternative representation for signals is known as the c-t and d-t Fourier series andtransform.
The Fourier series is named after the French physicist Jean Baptiste Fourier (1768-1830), who was the first one to propose that periodic waveforms could be represented by a sum of sinusoids (or complex exponential signals). When the signals are aperiodic and have finite energy the Fourier series is known as the Fourier transform. A signal with such decomposition is said to be represented in the frequency domain. By representing signals in terms of sinusoids, we will obtain an alternative expression for the input-output behavior of an LTI system which is a weighted sum of the system response to each complex sinusoidal. This type of representation not only leads to a useful expression for the system response but also provides a very
Complex Sinusoids and 3.2 perceptive characterization of signals and systems. In this chapter, we focus on the Fourier representations of signals and their properties. We will begin our discussion on studying the response of LTI systems to complex sinusoids. Then, we will consider the development of a representation of signals as linear combinations of complex sinusoids. Properties of c-t and d-t Fourier representations will also be discussed. Finally, the basic concept of filtering will be introduced. LTI Systems Sinusoidal input signals are often used to characterized the response of a system. In Chapter 2, we discussed how to
characterize an LTI system using the impulse and unit step signals. We discovered that when the impulse response is known, we can determine the response of an LTI system to any arbitrary input by a weighted sum (integral) of time-shifted impulse responses. In this section, we will examine the relationship between the impulse response and the steady-state response of an LTI system to a complex sinusoidal input. Let consider the d-t complex sinusoidal input expressed as x[n] = e jwn. Hence the response y[n] is given by
(3.1) Let H(ejw) be the “frequency response” of an LTI system and define as (3.2) Substitute H(ejw) in Eq. 3.1, we obtain (3.3) Frequency Response Input x[n]
Eq. 3.3 states that the response of an LTI system to a complex sinusoid is also , e jwn, a complex sinusoid of the same frequency as the input multiplied by the frequency response H(ejw). Fig. 3.1 illustrates the response of an LTI system to a complex sinusoidal input. H(ejw) e jwn e jwn h[n] Figure 3.1 A complex sinusoidal d-t input to an LTI system results in a complex sinusoidal output of the same frequency multiplied by the frequency response of the system. The analogous relationship holds in the c-t case as shown in Fig. 3.2.
H(jW) e jWt e jWt h(t) Figure 3.2 A complex sinusoidal c-t input to an LTI system results in a complex sinusoidal output of the same frequency multiplied by the frequency response of the system. The complex sinusoidal input in Eq. 3.3 is called an eigenfunction of the system since it produces an output that differs from the input by a constant multiplicative factor H(ejw). This multiplicative factor is called an eigenvalue of the system. We can notice that the frequency response H(ejw) is a complex value. That is, if we represent H(ejw) in complex form as shown in Eq. 3.4, then we may express H(ejw) in polar form as shown in Eq. 3.5. H(ejw) = HR(ejw) + HI(ejw) (3.4)
(3.5) Phase Response Magnitude Response where HR(ejw) = the real part of H(ejw), HI(ejw) = the imaginary part of H(ejw), |H(ejw)| = the magnitude response (the magnitude of H(ejw)) arg[H(ejw)] = the phase response (the phase of H(ejw))
If is an eigenfunction of the system with eigenvalue H(ejw), then each term in the input as indicated by Eq. 3.6, produces an output term . For the analysis LTI system with the complicated signal, let consider x[n] represented as weighted sum of N complex sinusoids: (3.6) Therefore, the output to x[n] defined by Eq. 3.6 can be evaluated as follows: (3.7)
That is, when the input x[n] is expressed as a sum of eigenfunctions, the output is also a weighted sum of N complex sinusoids, with the weights ak modified by the frequency response H(ejw). This property describes the signal behavior as a function of frequency which will be discussed later in this chapter. 3.2.1 Response to an Exponentially Damped Sinusoidal Previously, we only considered a complex exponential signal of the form e st with s = jW. Such signal is a pure imaginary complex exponential signal. In this section, we will observe the response of an LTI system to a generalization of the complex exponential signal where s = s+jW.
Let consider the c-t exponentially damped sinusoidal input expressed as x(t) = est. Hence, from Eq. 2.9, the response of the LTI system can be evaluated as follows: (3.8) Eq. 3.8 can be rewritten in a simply form as: (3.9) Transfer Function Input x(t)
where H(s) is called “transfer function” of an LTI system which is related to the system impulse response, h(t), by (3.10) Eq. 3.9 states that the response of an LTI system to an exponentially damped sinusoid is also , e st, an exponentially damped sinusoid of the same complex frequency as the input multiplied by the transfer function H(s). That is, the constant H(s) for a specific value of s is then the eigenvalue associated with the eigenfunction est. Similarly, the analogous relationship holds in the d-t case when the input sequence of a d-t LTI system is of the form: x[n]=zn. The
response of the system can be determined from the following equation: (3.11) System Function Input x(t) where H(z) is called “system function” of a d-t LTI system which is related to the system unit-sample response, h[n], by (3.12) Similarly, the constant H(z) for a specific value of z is then the eigenvalue associated with the eigenfunction zn.
3.2.2 Response to a Sinusoidal Signal Sinusoidal signals are the basic building blocks for generating more complicated signals. That is, knowing the response of LTI systems to a sinusoidal signal is so important. So far, we discovered that the response of an LTI system to the complex exponential signal ejwn(ejWt) or est or zn is also the complex exponential signal multiplied by H(ejw) or H(s) or H(z), respectively. Thus, if the input to an LTI system is a real-valued sinusoidal signal, the response of the system should result in the same manner since, by Euler's formula, any sinusoidal signals can be represented as a combination of complex exponential signals. Let x[n] be a sinusoidal signal;
(3.13) Using Euler’s relation, the real-valued sinusoidal signal can be rewritten as: (3.14) From Eq. 3.14, x[n] is now represented as a linear combination of two complex exponential signals which are complex conjugate to each other. Hence, from Eq. 3.7, the response of an LTI system to x[n] defined by Eq. 3.14 can be evaluated as follows: (3.15)
From Eq. 3.15, the second term is the complex conjugate of the first term. Therefore, only the real part of either term will be remained. That is, (3.16) From Eq. 3.16, the response of an LTI system to the sinusoidal signal is another sinusoid of the same frequency but with different magnitude and phase. The magnitude of the input sinusoid is modified by the magnitude response, |H(ejw)|and the
Fourier Series Representation 3.3 phase of the input sinusoid is modified by the phase response, arg{H(ejw)}. The frequency response characterize the steady-state response of the system to sinusoidal inputs as a function of the sinusoid’s frequency. It is said to be a steady-state response since the input sinusoid is assumed to exist for all time and thus the system is in an equilibrium condition. of C-T Periodic Signals Fourier series (FS) are series of sinusoidal or complex exponential signals. It was first introduced by Jean Baptiste Joseph, Baron de Fourier who discovered that a complicate periodic signal (with a pattern
that repeats itself) consists of the sum of many simple waves. He suggested that most signals can be represented by a sum of sinusoidal signal with different frequencies. Hence, he has purposed a method to decompose a given periodic signal into a linear combination of sinusoidal signals having different frequencies. The resulting sum is called the Fourier series or the Fourier expansion. 3.3.1 Representation of Signals in Terms of Frequency Components A fundamental concept in the study of Fourier series is the spectrum which is the notation of the frequency content of a signal. For a large class of signals, the frequency content can be evaluated by decomposing the signal into frequency components given
by sinusoidal signals. In this section, the most general and powerful method for generating new signals from sinusoidal signals will be introduced. This method will create any signals by adding together a constant and N sinusoids, each with a different frequency, amplitude and phase as shown in Eq. 3.17. Mathematically, this signal may be represented by the equation (3.17) Using Euler’s relation, Eq. 3.17 can be rewritten as: (3.18)
Let Xkrepresent the phasor of the individual sinusoidal components. That is, (3.19) Substitute Eq. 3.19 into Eq. 3.18, the alternative form of x(t) can be represented as follows: (3.20) where X0 = A0. We see then that each sinusoid in the sum decomposes into two rotating phasors, one with positive frequency, Fk, and the other with negative frequency, -Fk. This form
follows the fact that the real part of a complex number is equal to one-half the sum of that number and its complex conjugate. Eq. 3.20 indicates the frequency domain representation of the signal x(t) in terms of a pair (0.5Xk, Fk) which is usually called the (frequency) spectrum. That is, the spectrum is just the set of pairs: {(X0, 0), (0.5X1, F1), (0.5X*1, -F1), (0.5X2, F2), (0.5X*2, -F2), … }. The spectrum of signal x(t) simply provides the information required to synthesize it. The graphical plot of the spectrum can be illustrated in Fig. 3.3.
Figure 3.3 Spectrum of the signal x(t) represented by Eq. 3.20 A general procedure for computing and plotting the spectrum of any signal is called Fourier analysis. This procedure involves simply decomposing a signal x(t) into the complex exponential form as shown in Eq. 3.20, and selecting off the amplitude, phase, and frequency of each of its rotating phasor components. The mathematical tools for performing this analysis are called "Fourier series" and "Fourier transforms".
3.3.2 Linear Combinations of Harmonically Related Complex Exponential We have seen how a signal can be created by a sum of a constant and N sinusoids having difference frequency, amplitude and phase. An interesting situation occurs when a signal x(t) is a periodic signal defined as follows: x(t) = x(t+T) for all t When T is the smallest positive, nonzero value, it is called the "fundamental period" and the value W0 = 2p/T is referred to as the "fundamental angular frequency". To maintain the fundamental period, T, of x(t), the frequency Fk in Eq. 3.20 must be the kth harmonic frequency of the
fundamental frequency F0 of x(t). That is, the signal x(t) will be a linear combinations of harmonically related sinusoids. Hence, if we substitute Fk in Eq. 3.20 with kF0 and allow the sum to be infinite (i.e., N = ∞), any periodic signal x(t) can be expressed as follows: or (3.21) or Fourier Series
where ak = the Fourier series coefficients, kW0 = the kth harmonic. F0 (W0) = the first harmonic k =1 (the fundamental (angular) frequency) The harmonic series defined by Eq. 3.21 is called the Fourier series (FS) of the periodic signal x(t). Fourier series represents any periodic signals in the form of the weights (ak) on a "discrete" set of the frequencies that are integer (k) multiples of the fundamental (angular) frequencyW0. Note that the Fourier series is a special case of Eq. 3.20 in that it is a linear combination of infinite (N = ∞) harmonically complex exponentials.
These FS coefficients ak are often referred to as the spectral coefficients of x(t). In general, FS coefficients ak are complex coefficients which can be represented in a polar form of: The magnitude of ak (Ak) is known as the magnitude spectrum of x(t). Similarly, the phase of ak (qk) is known as the phase spectrum of x(t). If x(t) is real periodic signal, the Fourier series coefficient ak and a-k are a pair of complex conjugate with respect to each other. That is,
For a real periodic signal, (3.22) The Fourier series coefficients ak of the complex exponentials in Eq. 3.21 are evaluated by the following equation: (3.23) The coefficient a0 is the constant or de component of x(t) given by (3.23) which is simply the average of x(t) over one period.
Alternative Forms of Fourier Series The Fourier series described by Eq. 3.21 is in the exponential form. In the case of realperiodic signals, the other two alternative forms of the Fourier series can be derived using Euler’s relation. Let x(t) be a real periodic signal having the Fourier series coefficients ak. Since a-k = a*k, then q-k = -qk. For a given value of k, the sum of the two terms of the same frequency kW0 in Eq. 3.21 yields (3.24a) or
(3.24b) By using Eq. 3.24 and rearranging the summation in Eq. 3.21, we can easily derive the combined trigonometric form for the Fourier series of real periodic signals: (3.25) A third form for the Fourier series of real periodic signals can be obtained by writing ak in rectangular form as
ak = Bk +jCk, where Bk and Ck are real. Hence, with this expression for ak, Eq. 3.24a can be rewritten as: (3.26) Substituting Eq. 3.26 into Eq. 3.21 yields the trigonometric form of the Fourier series
(3.27) where The exponential form (Eq. 3.21) and the combined trigonometric form (Eq. 3.25) of the Fourier series are probably the most useful forms in signal and system theory.
Note that the trigonometric form of the Fourier series expressed by Eq. 3.27 is normally rewritten as follows: (3.28) where bk and ck are real.
Convergence of the Fourier Series Fourier suggested that any periodic signal could be expressed as a sum of complex exponentials (or sinusoids). However, in fact, it is partially true in that Fourier series can be used to represent an extremely large class of periodic signals. In particular, a periodic signal x(t) has a Fourier series if it satisfies the Dirichlet conditions given by 1. x(t) is absolutely integrable over any period; that is, (3.29) 2. x(t) has only a finite number of maxima and minima over any period.
Fourier Series Representation 3.4 3. x(t) has only a finite number of discontinuities over any period. of D-T Periodic Signals In this section, we consider the Discrete- Time Fourier Series (DTFS) which is the Fourier series representation of discrete- time (d-t) periodic signals. Although, the principle concept of DTFS is similar to FS. There are some important differences. In particular, DTFS is a finite series while as FS is a infinite series. Being a finite series, DTFS always exists, as opposed to FS which requires some conditions for existence. A d-t signal x[n] is periodic with period N if
x[n] = x[n+N] for all n. When N is the smallest positive, nonzero value, it is called the "fundamental period" and the value w0 = 2p/N is referred to as the "fundamental angular frequency". The DTFS represents an N periodic d-t signal x[n] is defined as the series of Eq. 3.30: or (3.30) or
The D-T Fourier series coefficients ak can be evaluated from Eq. 3.31 as follows: (3.31) As in continuous time, DTFS coefficients ak in Eq. 3.31 are also referred to as the spectral coefficients of x[n]. These coefficients specify a decomposition of x[n] into a sum of N harmonically related complex exponentials. Each ak is associated with a complex sinusoid of a different frequency. Since there are only N distinct complex exponentials that are periodic with period N, DTFS representation is a finite series with N terms. Hence, if we consider more than N sequential values of k, the
values ak repeat periodically with period N. That is, ak = ak+N (3.32) If x[n] is real periodic d-t signal, DTFS coefficient ak and a-k are a pair of complex conjugate with respect to each other. That is, for a real x[n]. (3.33) There are two alternative forms for DTFS of realperiodic sequences which are similar to Eq. 3.25 and Eq. 3.27. If the polar form of
is used, DTFS of real periodic x[n] can be expressed as: if N is odd or as if N is even. (3.34) If we express ak in the Cartesian form of ak = Bk +jCk
where Bk and Ck are real, the alternative form for DTFS of a real periodic x[n] can be expressed as: if N is odd or as if N is even. (3.35)
The Continuous-Time Fourier 3.5 Transform (FT) A key feature of the Fourier series representation of periodic signals is the description of such signals in terms of the frequency content given by sinusoidal components. Now we would like to extend this notation to nonperiodic signals, also called aperiodic signals. As will be seen, the frequency components of aperiodic signals are infinitesimally close in frequency rather than harmonically related frequency as in the case of periodic signals. In other words, signals that are periodic in time have discrete frequency domain representations, while aperiodic time signals have continuous frequency domain representations. Therefore, the representation in terms of a linear combination takes the form of an
xT(t) ... ... -T -T1 T1 T T - T 2 2 integral instead of a sum and such representation will be called the Fourier transform. The extension of the Fourier series to aperiodic signals is based on the idea of extending the period to infinity. Let xT(t) denote the pulse train with period T as shown in Fig. 3.4. Figure 3.4 A continuous-time periodic pulse train. That is, (3.36)
To demonstrate the change in frequency component of xT(t) as T → ∞, the Fourier series coefficients ak for this pulse train will be evaluated. Since then, for k = 0 gives k = 0 (3.37a) For ak where k ≠ 0, we get (3.37b) which we can rewrite as
k ≠ 0 (3.38) where W0T = 2p. To illustrate the change in the amplitude spectrum |ak|, it turns out to be more appropriate to plot the amplitude spectrum |ak| scaled by T; that is, a plot of T|ak| versus W = kW0 will be generated. (3.39) That is, with W thought of as a continuous variable, the function “2sinWT1/W” represents the envelope of Tak, and the
coefficients ak are simply equally space samples of this envelope. As T1 is fixed, the envelope of Tak is independent of T. The plots of Tak for T=4T1, T=8T1, and T=16T1 are illustrated in Fig. 3.5. Figure 3.5 The Fourier series coefficients and their envelope of the periodic square wave in Fig. 3.4 for several values of T (with T1 fixed): (a) T=4T1; (b) T=8T1; (c) T=16T1.
From Fig. 3.5 it can be seen that as T is increased (with T1 fixed), the “density” of the frequency components, ak, increase, whereas the envelope of the magnitudes of the scaled spectral components, Tak, remains the same. In other words, the envelope is sampled with a closer and closer spacing. In the limit as T → ∞, Tak converge into a continuum of frequency components whose magnitudes have the same shape as the envelope of the discrete spectra shown in Fig. 3.5 and the pulse train xT(t) approaches a rectangular pulse, x(t), as shown in Fig. 3.6. That is, in mathematical terms, (3.40)
... ... -T1 T1 Figure 3.6 A pulse signal as limit of a pulse train signal. This example illustrates the effect of extending the period of a periodic signal to infinity which is the basic idea behind the development of Fourier representation for aperiodic signals. Previously, we have seen the effect of increasing the period of a periodic signal to “density” of the frequency components. Let us now examine the effect of this on the Fourier series representation of a periodic signal.
Let consider an aperiodic signal x(t) that is of finite duration (band limited). That is, for some number T1, x(t) = 0 if |t| > T1, as illustrated in Fig. 3.6 (a pulse signal). Then, we can reconstruct a periodic signal xT(t) for which x(t) is one period, as shown in Fig. 3.4(a pulse train signal). The periodic signal xT(t) has an exponential Fourier series that is given by (3.41) where W0T = 2p and (3.42)
As far as the integration is concerned in Eq. 3.42, the integrand on the integral can be rewritten as: (3.43) Now, let us generalize the formula for the Fourier series coefficient in Eq. 3.43 by defining the envelope X(jW) of Tak as (3.44)