Download
1 / 17
170 likes | 313 Views
V ŠB – Technical University of Ostrava, FEI, Department of measurement and control. Sophisticated vision system for multiagent robot s. Ostrava 2003, Czech Republic Radim Bernat ík. 2 teams Robots marked by color fields

E N D
VŠB – Technical University of Ostrava, FEI, Department of measurement and control Sophisticated vision system for multiagent robots Ostrava 2003, Czech Republic Radim Bernatík
2 teams Robots marked by color fields Tracking control Distortions and noises Sophisticated mesh VŠB – TUO, FEI, Dep. No. 455 Robotsoccer Ostrava 2003 Radim Bernatík
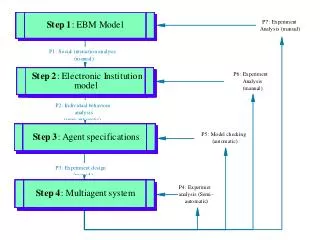
VŠB – TUO, FEI, Dep. No. 455 Application scheme Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Color fields detection • Simply RGB filter • Quickest algorithm • 3D table • Indexes: R,G and B • Value: color ID Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Coordinates transformation • Many distortions • Input: Position in camera image (pixels) • Output: Position on playground (mm) • Sophisticated mesh (explained below) Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Robots positions determination • Difference between colors • Guarantee system Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Visual ID to physical ID transformation • Strategy module independenton vision system module • Guarantee system Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Sophisticated mesh • Distortion • Optimal • Real • Mesh • Advantages • Placement • Coordinates calculation • Transformation Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Distortion – optimal Fish-eye • Axis symmetrical • Almost inaccessible Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Distortion – real • Software elimination: • Fish-eye symmetrical (objective lens) • Fish-eye unsymmetrical (incorrect lens) • Trapezoid (bad placed camera) • Software or hardware elimination: • Rotation • Excentric placement • Zoom Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Mesh – advantage • Advantage of mesh is that the only one algorithm is needed. • All distortions are eliminated in one algorithm by one run of this algorithm. Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Mesh placement Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Mesh – coordinates calculation • Points on curves (parts of circles) - 3 points on each curve place user - 55 points on each curve calculation • Inter-circles calculation - 55 horizontal curves - 55 vertical curves • Mesh points (3025) - intersection of curves Ostrava 2003 Radim Bernatík
Nonlinear mesh Find rectangle Remember last position VŠB – TUO, FEI, Dep. No. 455 Transformation (part 1) Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Transformation (part 2) Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Conclusion • Independent utilization of vision system (DLL module) • Number of teams and robots unlimited • Can work in difficult conditions • Supported by FRVŠ Grant No. 1735-G1-a, year 2003 Ostrava 2003 Radim Bernatík
VŠB – TUO, FEI, Dep. No. 455 Publications • Bernatík, R., Kovář, P., Horák, B.: Quick image recognize algorithms. International workshop R-MAS 2001, Ostrava, Czech Republic, 2001. • Bernatík, R., Kovář, P., Horák, B.: Advanced quick image recognize algorithms. International workshop EC of robot soccer 2002, Vienna, Austria, 2002. • Penhaker, M., Ožana, Š., Bernatík, R., Štula, T.: Využití MATLABu ve výuce Signálů a Soustav a v biomedicínckém inženýrství na Katedře měřicí a řídicí techniky na VŠB - TU Ostrava. Sborník příspěvků 10. ročníku konference MATLAB 2002, Praha, 2002, vol. II, 419-425, HUMUSOFT s.r.o., ISBN 80-7080-500-5. • Bernatík, R., Horák, B., Srovnal, V., Štula, T.:Mobile Robots Control Using of Multi-agent Technology, Agent days 2002, Belfort, France, 2002. • Bernatík, R., Horák, B.: Sensing and processing of phonocardiographic signal by PC sound card, IFAC workshop PDS 2003, Ostrava, Czech Republic, 2003, ISBN: 0 08 044130 0 • Bernatík, R.: Vision systém for determining and controlling multiagent robots system, POSTER 2003, Prague, Czech Republic, 2003. • Horák, B., Bernatík, R., Štula, T.: Transformation of image coordinates by using of adaptive mesh, FIRA Robot World Congress 2003, Vienna, Austria, 2003 Ostrava 2003 Radim Bernatík