Download
1 / 35
350 likes | 498 Views
A Framework for Haptic Broadcasting. Jongeun Cha, Ian Oakley, Yo -Sung Ho, Yeongmi Kim, and Jeha Ryu. Presented by Cong Ly CMPT-820 March 16, 2009. Overview. Introduction Types of Haptic Proposed Framework Content Creation Transmission Viewing & Interactions Implementation

E N D
A Framework for Haptic Broadcasting Jongeun Cha, Ian Oakley, Yo-Sung Ho, Yeongmi Kim, and JehaRyu Presented by Cong Ly CMPT-820 March 16, 2009
Overview • Introduction • Types of Haptic • Proposed Framework • Content Creation • Transmission • Viewing & Interactions • Implementation • Demonstration
Overview • Introduction • Types of Haptic • Proposed Framework • Content Creation • Transmission • Viewing & Interactions • Implementation • Demonstration
What is Haptic? • What is Haptic? • There is no agreement in the precise definition among researchers. • In this paper Haptic is used to define two sub-categories of feedback • Tactile • Kinesthetic
Motivations • Broadcast programs are generally linear • A begin, middle and end • Entertainment is a multi-billion industry • Consumers are actively seeking for interactive content. • We have the technology • MPEG-4 BIFS (Binary Format for Scenes) • Reachin API - VRML
Overview • Introduction • Types of Haptic • Proposed Framework • Content Creation • Transmission • Viewing & Interactions • Implementation • Demonstration
Passive Haptic • Passive Haptic • No direct interaction
Active Haptic • Active Haptic • Semi-interactions • Tactile and kinesthetic
Types of Haptic • Two types of Haptic Media • Linear and Non-Linear • Linear Haptic • Sequential progression • Human touches, impacts, sounds, etc…
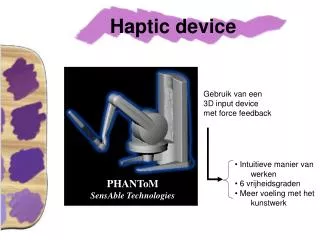
Types of Haptic • Non-linear Haptic • Interactivity, tactile information • Able to feel the surfaces • Dynamic content • Kinesthetic devices • PHANToM
Overview • Introduction • Types of Haptic • Proposed Framework • Content Creation • Transmission • Viewing & Interactions • Implementation • Demonstration
Content Creation • Audio and Video • Standard video camera • Microphone for audio • Three Approaches for capturing Haptic data • Physical sensors • Modeling tools • Analysis of other associated media
Physical Sensors • Capturing haptic surfaces • Piezoelectric resonance • Touch sensors • Movement data • 3D robotic arm • Accelerometer • Force-torque sensors
Content Creation • Audio and Video • Standard video camera • Microphone for audio • Three Approaches for capturing Haptic data • Physical sensors • Modeling tools • Analysis of other associated media
Modeling Tools • Capturing 3D scenes • 3D scanner to capture objects • ZCam, depth video camera (2.5D) • 3D Modeling tool • K-HapticModel • HAMLAT • Motion capturing
Content Creation • Audio and Video • Standard video camera • Microphone for audio • Three Approaches for capturing Haptic data • Physical sensors • Modeling tools • Analysis of other associated media
Automatic Generation • Automatic Generation • Extract trajectory of object from video • Dr. Greg Mori’s work • SFU Vision and Media Lab
MPEG-4BIFS • BIFS (Binary Format for Scenes) • Scenes are encoded and transmitted separately • Local and remote animations • User Objects interaction • Enables different points of view (3D) • Scenes description • Consist of information about the objects • Time and place • Relations between the objects
MPEG-4 BIFS Proposed extended BIFS nodes
MPEG-4BIFS • BIFS Nodes Content • Store data gathered during Creation • Ie. Piezoelectric sensors, modeling tools • DepthMovie Node • Identical to DepthImage • Added MovieTexture for tactile content
Viewing & Interaction • Haptic Compositor • Route elements to renderers • Haptic Renderer • Decode objects positions • Generate interaction forces • Tactile Renderer • Decode tactile information • Thermal perception, intensities of tactile
Overview • Introduction • Types of Haptic • Proposed Framework • Content Creation • Transmission • Viewing & Interactions • Implementation • Demonstration
Implementation • Implementation by the authors
Implementation • Components • GPAC Project on Advanced Content • multimedia framework • BIFS Broadcaster • MPEG-4 BIFS • Darwin Streaming Server • Apple's QuickTime Streaming Server • Standard RTP and RTSP protocols • Osmo4 Player • From GPAC framework
Overview • Introduction • Types of Haptic • Proposed Framework • Content Creation • Transmission • Viewing & Interactions • Implementation • Demonstration
Demonstration • Home Shopping Scenario
Demonstration • Movie with Tactile Feeling
Industry • D-Box – http://www.d-box.com • Pneumatic actuated chairs • Used for movies and simulations
Industry • PHANToMSensable Technologies • Developed by a student at MIT
Conclusions • Haptic Media enhances existing multimedia • Such as movies • Haptic can be used in • Surgical Training • Military • Commercial • Proposed Framework is feasible • Tools needed are readily available
That’s all That’s all folks Questions?
References • Jongeun Cha, Ian Oakley, Yo-Sung Ho, Yeongmi Kim, and JehaRyu “A Framework for Haptic Broadcasting,” IEEE Multimedia Magazine • G. M. Krishna and K. Rajanna, “Tactile Sensor Based on Piezoelectric Resonance,” IEEE Sensors Journal, vol. 4, no. 5, 2004, pp. 691-697. • Y. Kim, S. Kim, T. Ha, I. Oakley, W. Woo, and J. Ryu, “Air-Jet Button Effects in AR,” Int’l Conf. Artificial Reality and Telexistence, LNCS 4282, 2006, pp. 384-391. • SFU Visual and Modeling Lab, http://www.cs.sfu.ca/research/groups/VML/index.html • MIT Tech, “Robotic Gripper with Phantom Sensable Technologies,” http://techtv.mit.edu/videos/467-robotic-gripper-with-phantom-sensable-technologies • Sensable Technologies, “PHANToM,” http://www.sensable.com/haptic-phantom-premium-6dof.htm • Raunhofer Institute, “MPEG-4 BIFS Binary Format for Scenes”, http://www.iis.fraunhofer.de/Images/MPEG-4%20BIFS_tcm389-67584.pdf