Download
1 / 10
100 likes | 122 Views
Lecture 13 Sparse matrix computation. Matlab function: spdiags. Download spdiags01.m And spdiags02.m. n=5; e = ones(n,1); A = spdiags([e -2*e 3*e], -1:1, n, n) full(A) >> spdiags01 A = (1,1) -2 (2,1) 1 (1,2) 3 (2,2) -2 (3,2) 1

E N D
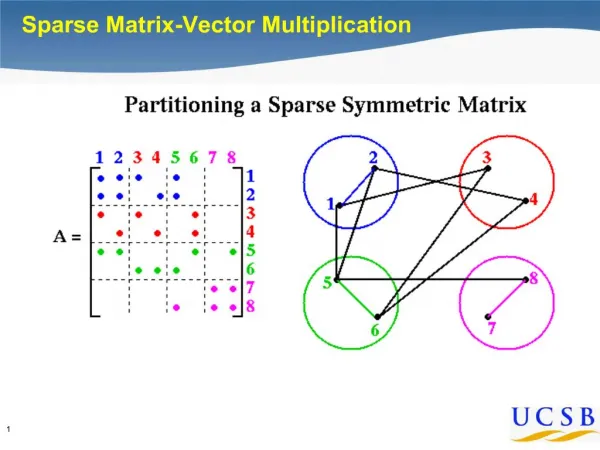
Lecture 13 Sparse matrix computation Matlab function: spdiags Download spdiags01.m And spdiags02.m
n=5; e = ones(n,1); A = spdiags([e -2*e 3*e], -1:1, n, n) full(A) >> spdiags01 A = (1,1) -2 (2,1) 1 (1,2) 3 (2,2) -2 (3,2) 1 (2,3) 3 (3,3) -2 (4,3) 1 (3,4) 3 (4,4) -2 (5,4) 1 (4,5) 3 (5,5) -2 ans = -2 3 0 0 0 1 -2 3 0 0 0 1 -2 3 0 0 0 1 -2 3 0 0 0 1 -2
n=5; e1 = [1; 2; 3; 4; 5]; e2=[-1; -2; -3; -4; -5]; e3=[11; 12; 13; 14; 15]; A = spdiags([e1 e2 e3], -1:1, n, n); full(A) >> spdiags02 … ans = -1 12 0 0 0 1 -2 13 0 0 0 2 -3 14 0 0 0 3 -4 15 0 0 0 4 -5 full(A) – display matrix in usual format
Define diagonals –2, 0 and 1 A = spdiags([e1 e2 e3], [-2 0 1], n, n) >> full(A) ans = -1 12 0 0 0 0 -2 13 0 0 1 0 -3 14 0 0 2 0 -4 15 0 0 3 0 -5
Convert from sparse matrix to reduced form Taking into account nonzero diagonals only [B,d] = spdiags(A) extracts all nonzero diagonals from the m-by-n matrix A. B is a min(m,n)-by-p matrix whose columns are the p nonzero diagonals of A. d is a vector of length p whose integer components specify the diagonals in A. Example: >> [B d]=spdiags(A) B = 1 -1 0 2 -2 12 3 -3 13 0 -4 14 0 -5 15 d = -2 0 1
The same in standard representation of matrix >> A0=full(A) A0 = -1 12 0 0 0 0 -2 13 0 0 1 0 -3 14 0 0 2 0 -4 15 0 0 3 0 -5 >> [B1,d1]=spdiags(A0) B1 = 1 -1 0 2 -2 12 3 -3 13 0 -4 14 0 -5 15 d1 = -2 0 1
If a column of B is longer than the diagonal it's replacing, spdiags takes elements of super-diagonals from the lower part of the column of B, and elements of sub-diagonals from the upper part of the column of B. >> full(A) ans = -1 12 0 0 0 0 -2 13 0 0 1 0 -3 14 0 0 2 0 -4 15 0 0 3 0 -5 B = 1 -1 0 2 -2 12 3 -3 13 0 -4 14 0 -5 15
Inclass 1 Modify Use spdiags to create the following sparse matrix: 1 2 0 0 0 0 0 0 0 0 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1 2 0 0 0 0 0 0 0 -1 0 1
Newton’s method for system of two nonlinear equations Download newton2d01.m Function newton2d01 Set initial (x,y) point, maximum number of iterations, and convergence tolerance. for i= 1:maxiter Perform Newton update; check for conver-gence; print iterates end Define functions f1(x,y), and f2(x,y) and JacobianJacob(x,y).
function newton2d01 %solution of system of two nonlienar equations % f1(x,y) = exp(x)*y = 0 % f2(x,y) = x*cos(y) = 0 % using a Newton iteration. Calls function f1 and f2 and % Jacobian matrix Jacob. % % Setup x = 0.2; y = .5; maxiter = 25; tol = 1.e-6; err = inf; iter = 0; fprintf('iter = %3.0f, x = %6.4f, y = %6.4f, \n', 0, x, y); % Newton update. while err > tol & iter <= maxiter J = Jacob(x,y); rhs = -[f1(x,y);f2(x,y)]; dxy = J\rhs; x = x + dxy(1); y = y + dxy(2); err = norm([f1(x,y);f2(x,y)],Inf); iter = iter+1; disp(['Iteration number = ',num2str(iter),' x=',num2str(x),' y=',num2str(y),' Backward error=',num2str(err)]); end function z = f1(x,y) z = exp(x)*y; function z = f2(x,y) z = x*cos(y); function xx = Jacob(x,y) xx = [exp(x)*y, exp(x); cos(y), -x*sin(y)];