Download
1 / 15
150 likes | 278 Views
How to Control How Things Move. Robert Love, Venkat Jayaraman July 1, 2008 SSTP Seminar – Lecture 8. Introduction Open loop vs closed loop control system Feedback Control Linear Time Invariant systems Laplace transform and transfer function Block diagrams Modeling PID Control

E N D
How to Control How Things Move Robert Love, Venkat Jayaraman July 1, 2008 SSTP Seminar – Lecture 8
Introduction Open loop vs closed loop control system Feedback Control Linear Time Invariant systems Laplace transform and transfer function Block diagrams Modeling PID Control System Performance Hardware (PLC) Overview
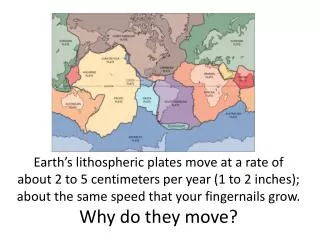
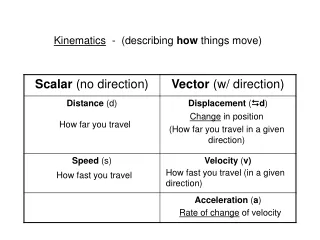
Control System Alter the future behavior of systems Example- Cruise control in the cars All control loops have the same basic form regardless of the application area. Introduction
Open loop controller Send signals directly to the controller. No means to check if the task was performed correctly Closed loop controller Translates the output of system into electrical signal that can be communicated into the controller If motor turns faster than required velocity, then controller will deliver less power to the motor Open Loop vs Closed Loop Control System
Feedback Control 11/19/2014 UF Flight Controls Lab 5
Properties of LTI systems Linear: Additive [inp1(t) + inp2(t)] = [outp1(t) + outp2(t)] Time invariant: Doesn’t matter when starts inp(t + d) seconds = outp(t + d) seconds Linear Time Invariant System
Laplace transform Converts an ordinary differential equation to a linear equation Transfer function Maps the relationship between the input and the output of a LTI system Laplace Transform and Transfer Functions
Block Diagram Reduction All functions in frequency domain
Modeling • Note DOF • Observability • Sensors Required? • Controllability • Actuators Required? UF Flight Controls Lab
Basic PID Control • Error Function: define this to start • Proportional: dynamics of system accentuated or reduced • Integral: integral of error signal accentuated or reduced • Derivative: damping of a system accentuated or reduced • Tune Gains to ensure stability and desired response UF Flight Controls Lab
System Performance • Performance • Rise Time • Overshoot • Undershoot • Settling Time http://virtual.cvut.cz/dynlabmods/syscontrol/node57.html UF Flight Controls Lab
Hardware • Sensors • Examples? • Actuators • Examples? • Microprocessor/Microcontroller • Digital to Analog Converter (DAC) • Analog to Digital Converter (ADC) UF Flight Controls Lab
PLC is a digital computer used for automation of industrial processes Designed for multi input and multi output Programs stored in battery backed non volatile memory Real time Programmed in ‘ladder logic’ Ladder diagram read top to bottom, left to right Programmable Logic Controller (PLC)
Activity • Flight Control Simulation with FMS • Recall: How many DOF’s does an airplane have and what are they? • What error functions might we use? • How do we control these error signals? UF Flight Controls Lab
State Space Here we have a Linear, Time Invariant System UF Flight Controls Lab