Download
1 / 52
610 likes | 1k Views
Lecture 31: Transfer functions, canonical forms and controllability. Quick review of transfer functions. (First) companion form (phase canonical form). Stability: the Hurwitz determinants. Controllability (and its theorem). Introduction to feedback control.

E N D
Lecture 31: Transfer functions, canonical forms and controllability Quick review of transfer functions (First) companion form (phase canonical form) Stability: the Hurwitz determinants Controllability (and its theorem) Introduction to feedback control
The transfer function relates the Laplace transform of the output to the Laplace transform of the input We can use what we know to write H in terms of the various matrices we have defined where we ignore the initial conditions in creating the transfer function
We can manipulate this define There is a lot more information on the right hand side than the left hand side Going from a transfer function to a set of dynamical equations may not give us the physics
Some more definitions So the transfer function is Define the adjoint matrix (to A*) and the characteristic polynomial Denote the dimension of the state by kas we have done before
cp is a polynomial of degree k in s. The zeroes (roots) of nc are called zeroes, those of cp (the eigenvalues) are called poles If nc and cp have common factors, do not cancel them This is called pole-zero cancellation. We’ll see issues here shortly. is a polynomial in s of degree at most k - 1 If you are given a transfer function with its denominator a polynomial of degree less than k you have a problem We can use this to find state space formulations from transfer functions these do not necessarily reflect actual physics!
This is because there is much more information on the right hand side than the left hand side! The transfer function depends on the output, while the dynamics does not. Let’s see some of the consequences in the context of the overhead crane.
The overhead crane y M Wheels roll without slipping Torque is applied to the rear wheel Neglect the inertia of the wheels Denote wheel radius by r q m (y1, z1)
Let’s skip the derivation (it’s in the last lecture) and move directly to the state space problem You can compare these to Friedland’s equations for the inverted pendulum They are identical except for the sign of gravity!
Consider the following choices of output and the transfer functions they give where
Only the first one shows the zero eigenvalue — the others have gotten rid of it by pole-zero cancellation You have learned how to get sort of dynamics from the transfer function — these transfer functions will yield different dynamics Let’s review the process in terms of an example I hope you have seen.
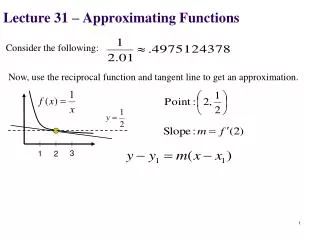
You may have done this Tuesday night, but let me look at one you were to have looked at Expand this We can replace s by time derivatives (remember that we have neglected initial conditions)
I’m going to define a state vector z, to distinguish it from the physical states x Friedland calls this x. (This is in §3.7) Normally we would write z1 = y, and move on from there. The derivatives on the right hand side mean that we need to be a bit fancier We must incorporate u as part of the z description
The analog of equation 3.98 (3.99) The sequence 3.100 p0 is there for completeness I suspect it is always zero
We need to plug all that into the equation and equate coefficients to satisfy this equation, which will determine the pi. All the zs cancel from this expression, so we can find ps by making all the u terms vanish In this case the result is
The state equations are then You can see that u appears in all three equations, so this is controllable We can make A and B matrices out of these
Let’s look at this in Mathematica so we can see the details of the calculation
A is in companion form (equation 3.88), but B is not We need to learn some more stuff before we can get B in its companion form Some drawbacks of this approach are: it does not guarantee us a picture of the physics it’s clumsy, and requires a transfer function transfer functions don’t work well for multi-output systems
Let’s take a look at the three ”reduced” transfer functions for the overhead crane These all suggest a third order system, but we may expect them to be different Let me cite the results first, and then we’ll go to Mathematica to see how it went
All three A1 matrices are the same We will find the correct fourth order A1 later. It will be
The B1 vectors are different All of this is merely a cautionary tale about transfer functions I took a set of dynamical equations, chose outputs and generated transfer functions three out of four of these did not reproduce the correct dynamics! Let’s look at the Mathematica for these
We do, however, love to have A in companion form The cool thing about the first canonical (companion) form is the relation between the coefficients in the last row of the matrix and the eigenvalues Consider a general 6 x 6 example and find its characteristic polynomial (in Mathematica)
This is true for systems of any order: the characteristic polynomial can be found from the coefficients of A1
What we’d like to be able to do is start from a general problem in state space and transform A into canonical (companion) form This is a linear transformation, and so there ought to be a matrix T such that A1 = TAT-1. There is such a matrix if and only if the system is controllable Not only does the matrix transform A into A1, but it also transforms B into a helpful form.
Phase Canonical Form/Companion Form Start with the usual single input problem Form the matrix Q The system is controllable if and only if the rank of Q = k Note that this controllability theorem applies to multi-input systems For a single input system the rank condition is equivalent to a nonzero determinant Friedland gives a proof for those who are interested
Take the last row of its inverse This is a row vector, and it is the first row of T, which is given by
A 6 x 6 problem would look like This looks just like the smaller problem that we worked out from the transfer function Let’s take a look at the overhead crane/ the pendulum on a cart
The overhead crane y M Wheels roll without slipping Torque is applied to the rear wheel Neglect the inertia of the wheels Denote wheel radius by r q m (y1, z1)
We can skip the derivation and move directly to the state space problem You can compare these to Friedland’s equations for the inverted pendulum They are identical except for the sign of gravity!
We can do some things without putting in numbers. which I always find somewhat comforting, although I do need Mathematica
Its inverse is also presentable Here is T1
T = T-1 =
A1 = You can see the zero eigenvalue
Do you know about Descartes’ Rule of Signs? It’s a simple test for roots (we’ll do a more complicated one shortly) The number of positive roots cannot exceed the number of changes in sign of P(s) The number of negative roots cannot exceed the number of changes in sign of P(-s) For us now P(s) = P(-s) =
There are no changes of sign in the characteristic polynomial therefore there are no positive roots. There are three changes of sign in the characteristic polynomial of -s therefore there are at most three negative roots The possibilities are: zero and three negative roots zero, one negative root and a complex conjugate pair of roots The latter is the case for the parameters of the problem The eigenvalues are
The Routh-Hurwirz procedure allows you to detect much more — the number of roots with positive real parts, which we’d like to be zero There are actually two procedures: the Routh sequence and the Hurwitz matrix The Routh sequence tells you the number of positive roots but it has special cases The Hurwitz matrix simply tells you if all the roots have negative real parts but it is easy to set up and use Friedland discusses the latter; let me do the same The matrix is built from the coefficients of the polynomial
Now you need to calculate the Hurwitz determinants which are all the principal determinants etc.
The system is stable if all these determinants are positive Look at the overhead crane
Is this stable? No, because the last determinant in the sequence (at least) is zero — not positive We know that the system is marginally stable because of the zero eigenvalue and the Hurwitz determinants rank marginally stable as not stable
The Routh sequence gives us more information: the number of roots with positive real parts. It does not deal well with ambiguous cases, and it is more work than the Hurwitz matrix so I will not go through it here. You should be aware that it exists You can look it up on your own if you are interested. Let’s look at automating the Hurwitz procedure in Mathematica.
Let’s look at the transformation for the overhead crane in Mathematica
Now let’s get back to solving our problem in z space Let’s change the sign of gravity to make this unstable and hence more interesting
As before, we are not going to be able to get much further without numbers And the eigenvalues are Our task is to find u such that the system is stable — all the eigenvalues are to have negative real parts
Consider general feedback: u proportional to the elements of the transformed state I will call Gz the gain matrix in z space (The minus sign is traditional; we look for negative feedback)
The general equation is now closed loop The eigenvalues of the closed loop system are entirely determined by the coefficients in the last row of the closed loop matrix and I have enough constants to make them anything I want!
Denote the desired eigenvalues (poles in common parlance) by s1, s2 etc.
The desired characteristic polynomial will be and all you need to do is equate terms