Download
1 / 13
130 likes | 150 Views
Creating compliant structures with sensors and actuators, utilizing reflexes for mobility. Discussing design, actuation, sensing, and learning in robotics.

E N D
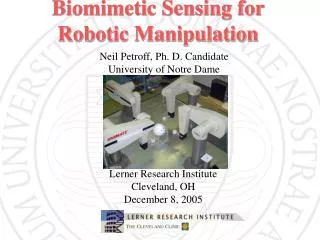
Biomimetic Robots for Robust Operation in Unstructured Environments M. Cutkosky and T. KennyStanford University R. Full and H. KazerooniU.C. Berkeley R. HoweHarvard University R. Shadmehr Johns Hopkins University http://cdr.stanford.edu/touch/biomimetics Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Behold Behemoth ... His bones are tubes of bronze, his limbs like bars of iron. Job 40.18 Boadicea climbing a rock, by M. Binnard
Main ideas: • Use novel layered prototypingmethods to create compliant biomimetic structures with embedded sensors and actuators (Cutkosky, Kenny, Full) • Develop biomimetic actuation and control schemes that exploit “preflexes” and reflexes for robust locomotion and manipulation (Kazerooni, Howe, Shadmehr, Cutkosky) Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Status(9.10.98) • “Building block” design/fabrication environment being tested and first components with embedded sensors, electronics fabricated • Meetings among SU, SRI, UCB to determine biomimetic actuators for fabrication and testing at each site • Designed and built apparatus for leg stiffness and perturbation experiments • <Howe?> • Experimental results on human adaptive control suggest a specific design for manipulation • Modeling and system I.D. have been applied to capture human walking on hills. The results have been used to develop two-legged machines. Comparison with biological models is underway. Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Topics for discussion and planning I. Mobility (*Full, Kazerooni, Howe) • Autonomous and cooperative • Lessons from insect and vertebrate biology II. Manipulation (*Howe, Shadmehr, Cutkosky) • In insects, in humans • Role of sensing, adaptation III. Learning and adaptation (*Shadmehr, Howe, Kazerooni) • Focus on adaptation for cooperative mobility, manipulation • Role of adaptation for robust autonomous robots IV. Fabrication & integration experiments (*Cutkosky, Full, Kenny) V. Sensing (*Kenny, Full, Howe, Cutkosky) VI. Actuation and control (*Cutkosky et al) *discussion leader Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Mobility Level of Interaction with Human Power Power&Information Information Collaborative Autonomous Unpowered Lower Extremity Enhancer Powered Lower Extremity Enhancer Powered Human Assisted Walker Mobile “insect” Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Mobility: Modeling insect locomotion dynamics A dynamic cockroach model, created in collaboration with the MIT Leg Lab, is stable when stiffness and damping feedback are added to the feed-forward joint torques (R. Full) Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Modeling human locomotion (Kazerooni) Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
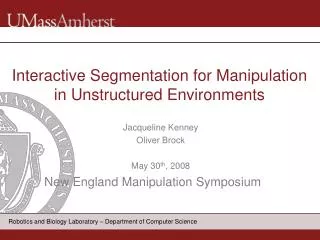
Adaptation in manipulation Experimental Framework for understanding how humans go about modulating impedance while interacting with an unstable system(Shadmehr, Kazerooni) Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Motor control, adaptation model (Shadmehr) Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Fabrication and joint experiments: concept for a biomimetic “Insect-Leg” A prototype design of the same leg employing three-dimensional plastic “exoskeleton” surrounding with embedded actuators, sensor and cooling system. Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA
Sensing: MicroStructures and Sensors Lab (MSSL) Kenny Research on Fundamental Properties and Applications of MEMS-based MicroMechanical Devices. • Micromechanical Sensors. • Micromechanical Elements for Scientific and Technological Collaboration Partners. • Devices and Instruments for Studies of Fundamental Properties of Micromechanical Structures. Collaborators : IBM, JPL, NRL, SNL, SAIC, Medtronic, Raychem, Lucas, Seagate, Perkin-Elmer... Students from :ME, EE, Appl Phys, A/A Piezoresistive Lateral Accelerometer 2-Axis AFM Cantilevers for Surface Friction Experiments and Thermomechanical Data Storage Flow Visualization in Microchannels Ultrathin Cantilevers for attoNewton Force Detection
Actuation and control: Mechanics and muscle activation patterns (Full) Three-dimensional musculo-skeletal model of the leg of B. discoidalis constructed by Full’s lab. Simulations such as these help characterize the role of individual muscles in locomotion. Sept 9-10, 1998 MURI Kick-off meetings, Berkeley/Stanford, CA