Download
1 / 9
90 likes | 242 Views
Chapter 6 Balancing of Machinery. §6 - 1 Purposes and Methods of Balancing. §6 - 2 Balancing of Rigid Rotors. § 6 - 1 Purposes and Methods of Balancing. 一、 Purposes of Balancing.

E N D
Chapter 6 Balancing of Machinery §6-1Purposes and Methods of Balancing §6-2 Balancing of Rigid Rotors
§6-1 Purposes and Methods of Balancing 一、Purposes of Balancing The center of mass of some machine elements may not coincide with their rotating centers because of the asymmetry of the structure. Even for symmetrical machine elements, the center of mass may still be eccentric because of uneven distribution of materials, errors in machining and also in casting and forging. The centrifugal force exerted on the frame is time varying, and it will therefore impart vibration to the frame. This vibration can adversely affect the structural integrity of the machine foundation. Purposes:We should try to eliminate the unwanted centrifugal forces in machines, especially in high-speed machinery and precision machinery. 二、Methods 1. Balancing of rotors Rotors——Parts constrained to rotate about a fixed axis are called rotors.
(1)Rigid rotors Rigid rotors——If the rotating frequency of the rotor is less than (0.6 - 0 .7) nCl (where: nCl is the first resonant frequency of the rotor), then the rotor is supposed to have no deformation during rotation and is called a rigid rotor. (2)Flexible rotors Flexible rotors——If the working rotating frequency of the rotor is larger than (0.6-0.7) nCl, then the rotor will have large elastic deformation due to imbalance during rotation. The elastic deformation makes the eccentricity larger than the original one so that a new imbalance factor is added and the balancing problem becomes more complicated. Such a rotor is called a flexible rotor.
2. Balancing of mechanisms The coupler of a linkage has a complex motion. The acceleration of its mass center and its angular acceleration vary throughout the motion cycle. The coupler will therefore create a varying inertia force and inertia moment of force for any mass distribution. So the balance of linkages must be considered as a whole. The resultant inertia force of all moving parts is equal to the net unbalanced force acting on the frame of a machine, which is referred to as the shaking force. Likewise, a resultant unbalanced moment acting on the frame, caused by the inertia forces and inertia moments of all moving parts, is called the shaking moment. The shaking force and the shaking moment will cause the frame to vibrate.
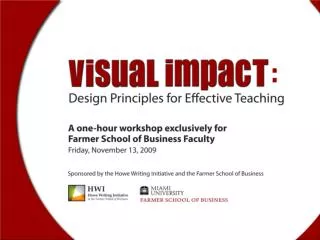
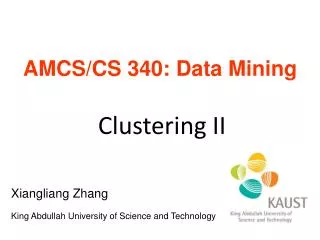
ω FI D G B e G §6-2Balancing of Rigid Rotors 一、Calculation for the Balancing of a Rigid Rotor Rotors whose axial dimensions B are small compared to their diameters D (usually B /D < 0.2), the masses of such rotors are assumed practically to lie in a common transverse plane. All centrifugal forces in this disk-like rotor are planar and concurrent. If the vector sum of these forces is zero, then the mass center of the system coincides with the shaft center and the rotor is balanced. Otherwise, it is called imbalance. Since the imbalance can be shown statically, such imbalance is called static imbalance.
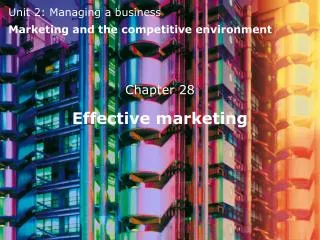
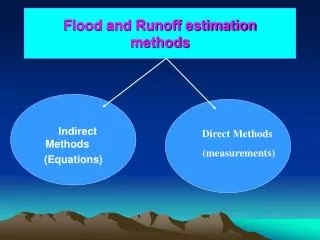
y m2 m’b r’b 2 r2 1 r1 m1 b x O rb mb Unbalanced masses are depicted as point masses miat radial distances ri. In this case, there are two masses, m1and m2. When the rotor rotates with constant angular velocity ω, each of the unbalanced masses produces a centrifugal force FIi FIi = miω2ri In this case, a third mass mb with rotating radius of rbis added to the system so that the vector sum of the three centrifugal forces is zero and balance is achieved. ∑F = ∑FIi+Fb= 0 m1r1+m2r2+ mbrb= 0 (mbrb)y = -∑ mirisini (mbrb)x = -∑ miricosi b= acrtan[(mbrb)y / (mbrb)x] mbrb= (mbrb)x2+(mbrb)y2
二、Dynamic Balancing of Rigid Rotors If b / D >0.2,although the resultant of the two centrifugal forces is zero, the forces are not collinear and a resultant couple will exist. The direction of the resultant couple changes during rotation. The resultant couple will act on the frame and tend to produce rotational vibration of the frame. Such an imbalance can only be detected by means of a dynamic test in which the rotor is spinning. Therefore, this is referred to as dynamic imbalance. The rotor in Fig. is therefore statically balanced and dynamically unbalanced. From the above, we can see that the conditions for the balancing of a non-disk rigid rotor are: Both the vector sum of all inertia forces and the vector sum of all moments of inertia forces about any point must be zero.
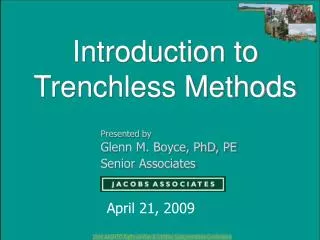
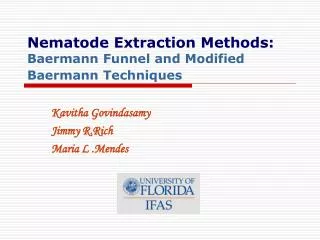
II F2II F2 m2 F1II r2 r3 F3II F2I r1 m3 F1I m1 l3 F1 F3 l2 F3I I l1 L Calculation for the Dynamic Balancing From Theoretical Mechanics, we know that the centrifugal force F can be replaced dynamically by a pair of forces FⅠ and FⅡ parallel to F and acting in two arbitrarily chosen transverse planes Ⅰ and Ⅱ . In this way, the complicated spatial force system has been converted into two simpler planar concurrent force systems on two planes.
The above methods can be extended to any rotor with any number of imbalances on any number of transverse planes. The conclusion is that any number of masses on any number of transverse planes of a non-disk rigid rotor can be balanced dynamically by a minimum of two masses placed in any two arbitrarily selected transverse planes. The selected transverse planes are called balance planes. In practice, those planes on which counterweights can be mounted easily ,or mass can be removed easily, may be chosen as the balance planes.