Download
1 / 65
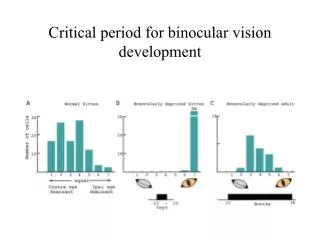
700 likes | 1.13k Views
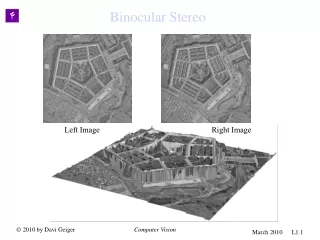
Binocular Vision Outline. Convergence of the eye as a cue to depth Binocular disparity as a cue to depth Limitations on stereopsis The computational problem of stereopsis. Binocular Convergence. Left retinal image. Right retinal image. Binocular Disparity. D = a - b. B. A. C. D.

E N D
Binocular Vision Outline • Convergence of the eye as a cue to depth • Binocular disparity as a cue to depth • Limitations on stereopsis • The computational problem of stereopsis
Left retinal image Right retinal image
Binocular Disparity D = a - b
B. A. C. D.
Positive disparities = Uncrossed disparities Negative disparities = Crossed disparities
Stereo fusion • Objects are “fused” when brain interprets disparate images in the two eyes as being the same object and perceives the depth of the objects
Stereo fusion • Objects are “fused” when brain interprets disparate images in the two eyes as being the same object and perceives the depth of the objects • When disparity gets too large • Double vision, • or brain ignores input from one eye
Panum’s fusional area • Range of depth’s that can be “fused” Panum’s fusional area
Size of Panum’s fusional area • Disparity limit = 10 - 60 minutes of arc
Size of Panum’s fusional area • Foveal Disparity limit = 10 - 60 minutes • for fixation at arm’s length, depth range = five inches or so
Size of Panum’s fusional area • Foveal Disparity limit = 10 - 60 minutes • for fixation at arm’s length, depth range = five inches or so • limit increases with size of object
Size of Panum’s fusional area • Foveal Disparity limit = 10 - 60 minutes • for fixation at arm’s length, depth range = five inches or so • limit increases with size of object • limit is larger for slowly moving objects
Size of Panum’s fusional area • Foveal Disparity limit = 10 - 60 minutes • for fixation at arm’s length, depth range = five inches or so • limit increases with size of object • limit is larger for slowly moving objects • Limit is larger in periphery than in fovea • As large as 3 degrees
Arrangement of wires
Arrangement of wires
Virtual world
Disparity acuity • Disparity acuity in fovea - as small as .05 minutes of arc.
Disparity acuity • Disparity acuity in fovea - as small as .05 minutes of arc • depth resolution = .036 cm at arm’s length
Disparity acuity • Disparity acuity in fovea - as small as .05 minutes of arc • depth resolution = .036 cm at arm’s length • Acuity is much better in fovea than in periphery
Why fovea/periphery differences • Range of disparities in natural scenes. • Fovea - high depth acuity. • Periphery - provides coarse information about where to make convergence eye movements.
Binocular Vision Outline • Convergence of the eye as a cue to depth • Binocular disparity as a cue to depth • Limitations on stereopsis • The computational problem of stereopsis
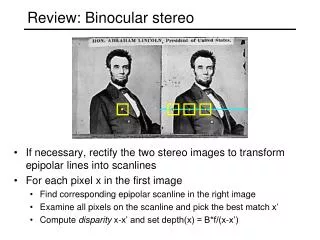
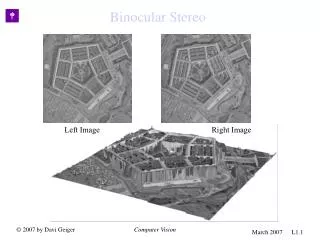
Two Computational Problems of Stereopsis • How does brain compute depth from disparity? • How does it know what in the left image to match to what in the right image?
Two Computational Problems of Stereopsis • How does brain compute depth from disparity? • How does it know what in the left image to match to what in the right image?
∆Z Z D = a - b
∆Z D = ∆Z * I / Z2 Z I D = a - b
∆Z D = ∆Z * I / Z2 ∆Z = D * Z2 / I Z I D = a - b
What happens to depth acuity as vergence depth increases? • What happens to the range of fusable depths (Panum’s fusional area) as the vergence depth increases?
Two Computational Problems of Stereopsis • How does brain compute depth from disparity? • How does it know what in the left image to match to what in the right image?
Midline of retinal image Right retinal image Left retinal image
The Correspondence Problem - Many possible matches for each point
The Correspondence Problem - Why not this interpretation?
The Correspondence Problem - Why not this interpretation?
The Correspondence Problem - Why not this interpretation?
Solution • Constraints on objects in the world • objects are solid and opaque • objects are for the most part are smooth
Solution • Impose constraints from the world • objects are solid • objects are for the most part are smooth • Matching constraints • Uniqueness • Ordering
The Correspondence Problem - Why not this interpretation?
Matching Constraints • Uniqueness • Ordering • Smoothness • Compatibility • If no compatible parts of two images are find, one gets binocular rivalry.