Download

1 / 33
330 likes | 599 Views
Kap 05 Newtons lover. Newtons lover. Summen av ytre krefter lik null => Ingen hastighetsendring Summen av ytre krefter er lik masse ganger akselerasjon Kraft er lik minus motkraft. Netons 2. lov - Komponentform. Turn - Strategi_1. Velg system. Turn - Strategi_2. Tegn inn

E N D
Newtons lover • Summen av ytre krefter lik null=> Ingen hastighetsendring • Summen av ytre krefter er lik masse ganger akselerasjon • Kraft er lik minus motkraft
Turn - Strategi_1 Velg system
Turn - Strategi_2 Tegn inn alle ytre krefter som virker på systemet TGR GG
Turn - Strategi_3 GG = mGg TGR Sett opp gjeldende vektor-ligning GG TGR + GG = 0 TGR - GG = 0 Komponentform
Turn - Strategi_4 Velg system
Turn - Strategi_5 TRC Tegn inn alle ytre krefter som virker på systemet GR TRG=TGR
Turn - Strategi_6 TRC GR = mRg GR TRG=TGR Sett opp gjeldende vektor-ligning TRC + GR + TRG= 0 TRC - GR - TRG = 0 Komponentform
Bilmotor - Strategi_1 Velg system
Bilmotor - Strategi_2 Tegn inn alle ytre krefter som virker på systemet T3 T2 T1
Bilmotor - Strategi_3 T3 T2 Sett opp gjeldende vektor-ligning T1 T3 cos600 - T2 = 0 T3 sin600 - T1 = 0 Komponentform T1 + T2 + T3 = 0
Bilmotor - Strategi_4 Velg system
Bilmotor - Strategi_5 Tegn inn alle ytre krefter som virker på systemet T1 G
Bilmotor - Strategi_6 Sett opp gjeldende vektor-ligning T1 G T1 + G = 0 T1 - G = 0 Komponentform
Skråplan - Strategi_1 Velg system
Skråplan - Strategi_2 Tegn inn alle ytre krefter som virker på systemet K T G
Skråplan - Stategi_3 T K G Sett opp gjeldende vektor-ligning T + G + K = m1a
Skråplan - Strategi_4 Kn Gn K T G T Kp Gp Gn G Dekomponer og sett opp vektor-ligningen på komponent-form Gp = Gsinv Gn = Gcosv Kp = R = uGn T - Gp - Kp = m1a Kn - Gn = 0
Skråplan - Strategi_5 T G G2 Gjenta prosessen med loddet som system G2 - T = m2a
Akselerometer - Strategi_1 Velg system
Akelerometer - Strategi_2 Tegn inn alle ytre krefter som virker på systemet T G
Akselerometer - Strategi_3 T G Sett opp gjeldende vektor-ligning T + G = ma
Akselerometer - Strategi_4 T G Ty = Tcos T Tx = Tsin G G = mg Dekomponer og sett opp vektor-ligningen på komponent-form Tsinβ = ma Tcosβ - mg = 0 ==> a = g tanβ
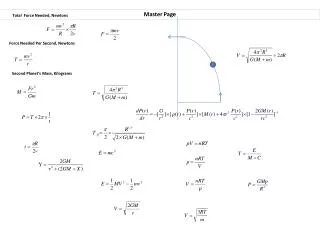
Sirkel- bevegelse med konstant banefart v1 v1 dv v2 r v2 | v1 | = | v2 | = v dv / v = ds / r = v dt / r a = dv / dt = v2 / r
Sirkel-bevegelse En partikkel beveger seg med konstant banefart v i en sirkel med radius r. Omløpstid T = 2r / v Akselerasjon a = v2 / r = 42r / T2 Sentripetalkraft F = ma = m v2 / r
Konisk pendel Fsinβ = mv2 / r Fcosβ - mg = 0 ==> tan β = v2 / gr
Flat kurve J = mg = mv2 / r ==> v = Sqrt(gr) N - mg = 0
Dosert kurve - Ingen friksjon N sinβ = mv2 / r ==> tanβ = v2 / gr N cosβ - mg = 0
Vertikal sirkel-bevegelse FT - mg = - mv2 / r FB - mg = mv2 / r