Download
1 / 1
10 likes | 186 Views
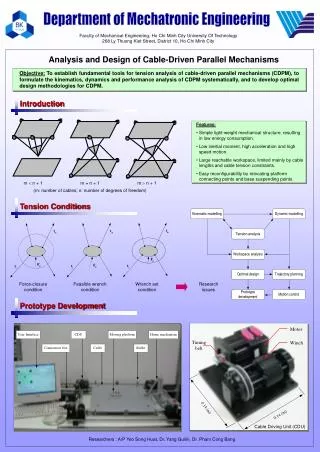
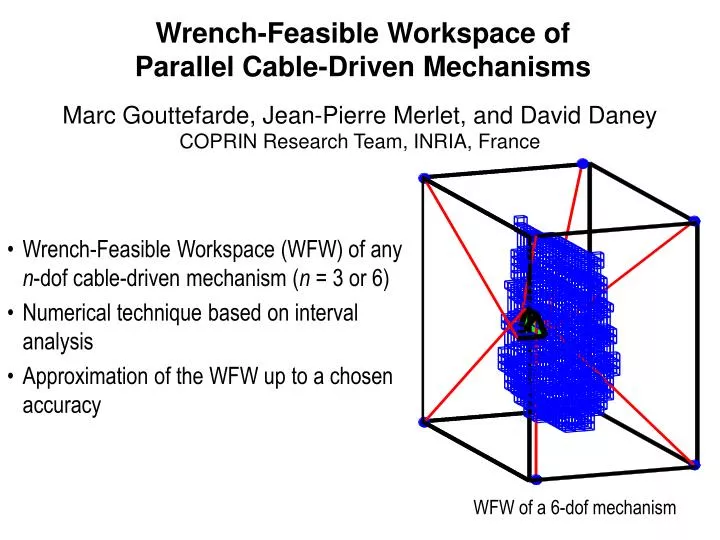
Wrench-Feasible Workspace of Parallel Cable-Driven Mechanisms. Marc Gouttefarde, Jean-Pierre Merlet, and David Daney COPRIN Research Team , INRIA, France. Wrench-Feasible Workspace (WFW) of any n -dof cable-driven mechanism ( n = 3 or 6) Numerical technique based on interval analysis

E N D
Wrench-Feasible Workspace of Parallel Cable-Driven Mechanisms Marc Gouttefarde, Jean-Pierre Merlet, and David DaneyCOPRIN Research Team, INRIA, France • Wrench-Feasible Workspace (WFW) of any n-dof cable-driven mechanism (n = 3 or 6) • Numerical technique based on interval analysis • Approximation of the WFW up to a chosen accuracy WFW of a 6-dof mechanism