Download
1 / 15
150 likes | 357 Views
Organic Computing – a Generic Approach to Controlled Self-organization in Adaptive Systems. Hartmut Schmeck, Institut AIFB, KIT, joint work with CMS, JB, MM, UR, HP, …. What Organic Computing is not about. 2 | Hartmut Schmeck. So, what is it about?.

E N D
Organic Computing – a Generic Approach to Controlled Self-organization in Adaptive Systems Hartmut Schmeck, Institut AIFB, KIT, joint work with CMS, JB, MM, UR, HP, …
What Organic Computing is not about 2 | Hartmut Schmeck
So, what is it about? • Collections of intelligent (embedded) systems(scenarios like smart house, car, office, factory, shop, healthcare,… …ubiquitous, pervasive computing). • Potentially unlimited networks (large number, mobility) • Spontaneous local interaction, leading to unexpected global behaviour (emergent phenomena as a result of self-organization) • Robust services in dynamically changing environments (e.g. mobile communication). • Flexible behaviour as a reaction to varying external constraints(e.g. traffic light control) • Design, management and acceptance problems wrt increasingly complex systems Controllability? Trustworthiness? 3 | Hartmut Schmeck
Origin of Organic ComputingWorkshops of the GI-/ITG-Sections on Computer Engineering in 2002 • Information technology is movingtowards the ubiquitous networked computer. • Complex ubiquitous systems need new concepts for organization and user interfaces to remain manageable and controllable. • Future computer systems have to be designed with respect to human needs. • Future computer systems have to be trustworthy. • Future computer systems have to be robust, adaptive, and flexible. • Systems having these properties will be life-like. We call themOrganic Computer Systems. • Based on range of other initiatives: ubiquitous, autonomic, … 4 | Hartmut Schmeck | March 2009
GI/ITG Position paper 2003:Vision for System Architecture > 2010 • Organic Computer Systems • will possess lifelike properties. • will consist of autonomous and cooperating sub systems and will work, as much as possible, in a self-organized way. • will adapt to human needs, • will be robust, adaptive, and flexible, • will be controlled by objectives (“goal-driven”), • will be trustworthy. • Self-organization allows for adaptive and context aware behaviour: • self-protecting • self-explaining • self-managing • … • self-configuring • self-optimizing • self-healing 5 | Hartmut Schmeck
Nature (1) OC-Principles (2) OC-Technology (3) Technical Applications Emergence Self-x OC-toolbox Car Office Telecom Factory Home Health&Care ... Basic technologies Observer/Controller Guarding Helper Threads Embedded Learning Complete system arch. … Autonomy Self-x. Emergence Awareness Cooperation Competition… Dissip. Struct. Ants Swarms Brain …. German Framework for Research on OC : DFG priority program 1183 „Organic Computing“ (2005 – 2011)3 phases of two years each, currently 19 projects, ~2 Mio € per year www.organic-computing.de/SPP 6 | Hartmut Schmeck
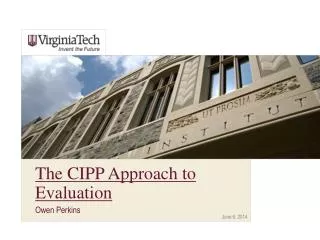
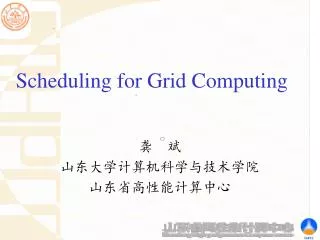
observation model observer controller goal / objectives system status aggregator data analyzer situation parameters predictor simulation model adaptation module fitness select time-space-pattern emergence detector 1 emergence detector 2 ... cluster prediction statistics ... pre-processor ∆t mapping action situation parameters evaluation select Ci Ai history history Fi select monitor log file select system data individual data action selector action Ai raw data system under observation and control (SuOC) Generic O/C-ArchitectureJ.Branke, M.Mnif, C. Müller-Schloer, U. Richter, H. Schmeck 2006 model selection 7 | Hartmut Schmeck
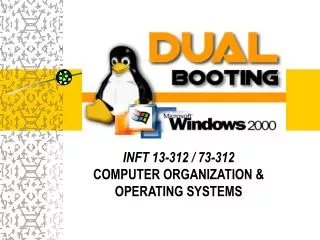
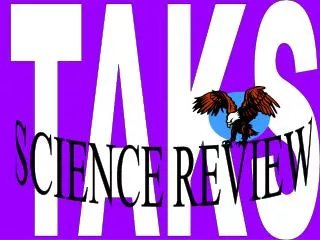
model selection user Layer 2 user user user user user Layer 2 Layer 2 Layer 2 Layer 2 Layer 2 observation model observer controller rule generator rule generator rule generator rule generator rule generator rule generator objectives aggregator EA EA EA EA EA EA observer 2 observer 2 observer 2 observer 2 observer 2 observer 2 data analyzer situation parameters predictor simulator simulator simulator simulator simulator simulator simulation adaptation fitness time-space-pattern emergence detector 1 emergence detector 2 ... select situation, quality of control situation, quality of control situation, quality of control situation, quality of control situation, quality of control situation, quality of control new rule cluster prediction new rule new rule new rule new rule new rule statistics ... Layer 1 Layer 1 Layer 1 Layer 1 Layer 1 Layer 1 pre-processor ∆t Controller 1 “LCS” Controller 1 “LCS” Controller 1 “LCS” Controller 1 “LCS” Controller 1 “LCS” controller 1 mapping action situation parameters evaluation observer 1 observer 1 observer 1 observer 1 observer 1 observer 1 select Ci Ai history history rule set rule set rule set rule set rule set rule set Fi select detector information detector information detector information detector information detector information detector information monitor log file parameters parameters parameters parameters parameters parameters select system data individual data action selector Layer 0 Layer 0 Layer 0 Layer 0 Layer 0 Layer 0 traffic light controller traffic light controller traffic light controller traffic light controller traffic light controller controller detectors detectors detectors detectors detectors action Ai raw data detectors traffic system component traffic traffic traffic traffic componentoutput system under observation and control (SuOC) Different view on O/C-architecture Action generation Off-line learning loop On-line learning loop Action selection and evaluation Internal system control 8 | Hartmut Schmeck
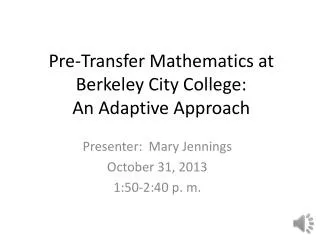
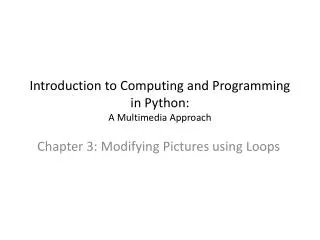
observer controller observer controller O C O C SuOC O C SuOC O C SuOC SuOC SuOC O C SuOC O C O C SuOC O C O C SuOC SuOC SuOC SuOC O C O C SuOC O C O C O C O C SuOC SuOC SuOC SuOC SuOC Realisation of OC systems • Central: One observer/controller for the whole system. • Distributed: An observer/controller on each system component. • Multi-level: An observer/controller on each system element as well as one for the whole system. • self-organising • bottom-up • emergent control • controlled self-organising • bottom-up / top-down • adaptive • top-down 9 | Hartmut Schmeck
Considereffective flow of control! vi(t) = #bits of (internal) action at time t ve(t) = #bits of (external) action at time t Define dynamic complexity reductionin time interval [t1, t2] r = dynamic degree of autonomy = ve(t) vi(t) time time selects observation model organic system controls observation model observer reports controller observes controls input output SuOC Dynamic degree of autonomy U systemstate goals Control Mechanism CM S‘
minimum green extension (secs. per actuation) max. green max. initial green extension (gap < allowable gap) Recall: car waiting? Example Application: Organic Traffic Control 11 | Hartmut Schmeck
Example application: highway traffic control • Project Autonomous (Fekete (Braunschweig), Fischer (Lübeck))Self-organized and self-regulated coordination of large swarms of self-navigating autonomous vehicles, as occuring in highway traffic • Hovering Data Clouds • Organic Information Complexes 12 | Hartmut Schmeck
Example application: • Production systems (W. Reif, Augsburg) • Formal analysis of different control strategies • Robots • Emergent behaviour • Learning methods 13 | Hartmut Schmeck
consumption production power time Example Application: Energy System • Use controlled self-organisation to handle spontaneous imbalances of energy supply and demand. • Goal: improved energy efficiency, reduced need for balancing power • Organicenergymanagement BGM internet 14 | Hartmut Schmeck
Conclusion, Challenges, Questions • OC provides generic architectures/methods which should be helpful in the design of explicit application systems, but it does not (cannot!) provide generic solutions! • How can we derive acceptable statements about the expected behaviour of a self-organising, adaptive system? • Where are the essential differences between the notions of • Fault tolerance and • Self-healing? • Is it possible to design all necessary responses to “system failures” at design time? • If we claim that there might be unanticipated situations at runtime, where self-healing is needed, is this just an indication of lacking competence at design time? • At the end of this seminar we should have some answers to these questions! 15 | Hartmut Schmeck



![Intro to Adaptive Web Design [ChaDev Lunch]](https://cdn4.slideserve.com/7566148/intro-to-adaptive-web-design-dt.jpg)