Download
1 / 1
10 likes | 158 Views
. . . . Motivation. QoI vs QoS: QoI : associated with a piece of information can be defined as the value provided by it to the end user/application application dependent different from the notion of Quality of Service (QoS)

E N D
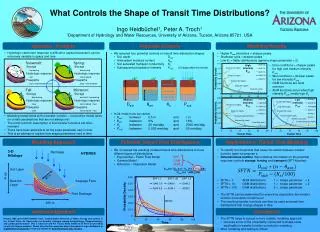
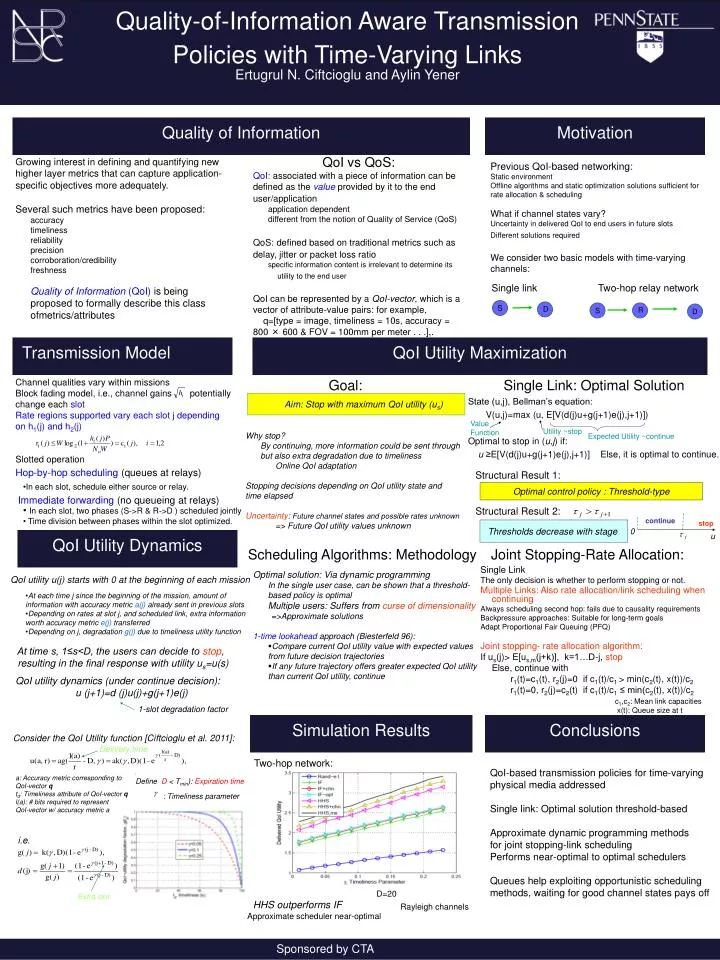
. . Motivation • QoI vs QoS: • QoI: associated with a piece of information can be defined as the valueprovided by it to the end user/application • application dependent • different from the notion of Quality of Service (QoS) • QoS:defined based on traditional metrics such as delay, jitter or packet loss ratio • specific information content is irrelevant to determine its utility to the end user • QoI can be represented by a QoI-vector, which is a vector of attribute-value pairs: for example, • q=[type = image, timeliness = 10s, accuracy = 800 × 600 & FOV = 100mm per meter . . .],. • . • Growing interest in defining and quantifying new higher layer metrics that can capture application-specific objectives more adequately. • Several such metrics have been proposed: • accuracy • timeliness • reliability • precision • corroboration/credibility • freshness • Quality of Information (QoI) is being proposed to formally describe this class ofmetrics/attributes Quality-of-Information Aware Transmission Policies with Time-Varying LinksErtugrul N. Ciftcioglu and Aylin Yener Previous QoI-based networking: Static environment Offline algorithms and static optimization solutions sufficient for rate allocation & scheduling What if channel states vary? Uncertainty in delivered QoI to end users in future slots Different solutions required We consider two basic models with time-varying channels: Single link Two-hop relay network S D S R D Transmission Model QoI Utility Maximization Channel qualities vary within missions Block fading model, i.e., channel gains potentially change each slot Rate regions supported vary each slot j depending on h1(j) and h2(j) Slotted operation Goal: • Why stop? • By continuing, more information could be sent through • but also extra degradation due to timeliness • Online QoI adaptation • Stopping decisions depending on QoI utility state and • time elapsed • Uncertainty: Future channel states and possible rates unknown • => Future QoI utility values unknown Single Link: Optimal Solution State (u,j), Bellman’s equation: V(u,j)=max (u, E[V(d(j)u+g(j+1)e(j),j+1)]) Optimal to stop in (u,j) if: u ≥E[V(d(j)u+g(j+1)e(j),j+1)] Else, it is optimal to continue. • Aim: Stop with maximum QoI utility (us) Value Function Utility ~stop Expected Utility ~continue Hop-by-hop scheduling (queues at relays) Structural Result 1: Structural Result 2: • In each slot, schedule either source or relay. Optimal control policy :Threshold-type Immediate forwarding (no queueing at relays) • In each slot,two phases (S->R & R->D ) scheduled jointly • Time division between phases within the slot optimized. Quality of Information continue stop Thresholds decrease withstage 0 u QoI Utility Dynamics Scheduling Algorithms: Methodology Joint Stopping-Rate Allocation: Single Link The only decision is whether to perform stopping or not. • Optimal solution: Via dynamic programming • In the single user case, can be shown that a threshold-based policy is optimal • Multiple users: Suffers from curse of dimensionality =>Approximate solutions 1-time lookahead approach (Biesterfeld 96): • Compare current QoI utility value with expected values from future decision trajectories • If any future trajectory offers greater expected QoI utility than current QoI utility, continue QoI utility u(j) starts with 0 at the beginning of each mission • Multiple Links: Also rate allocation/link scheduling when continuing • Always scheduling second hop: fails due to causality requirements • Backpressure approaches: Suitable for long-term goals • Adapt Proportional Fair Queuing (PFQ) • Joint stopping- rate allocation algorithm: • If us(j)> E[us,m(j+k)], k=1…D-j, stop • Else, continue with • r1(t)=c1(t), r2(j)=0 if c1(t)/c1 > min(c2(t), x(t))/c2 • r1(t)=0, r2(j)=c2(t) if c1(t)/c1 ≤ min(c2(t), x(t))/c2 • At each time j since the beginning of the mission, amount of information with accuracy metric a(j) already sent in previous slots • Depending on rates at slot j, and scheduled link, extra information worth accuracy metric e(j) transferred • Depending on j, degradation g(j) due to timeliness utility function • At time s, 1≤s<D, the users can decide to stop, • resulting in the final response with utility us=u(s) QoI utility dynamics (under continue decision): u (j+1)=d (j)u(j)+g(j+1)e(j) c1,c2: Mean link capacities x(t): Queue size at t 1-slot degradation factor Simulation Results Conclusions Consider the QoI Utility function [Ciftcioglu et al. 2011]: Delivery time Two-hop network: QoI-based transmission policies for time-varying physical media addressedSingle link: Optimal solution threshold-basedApproximate dynamic programming methodsfor joint stopping-link schedulingPerforms near-optimal to optimal schedulersQueues help exploiting opportunistic scheduling methods, waiting for good channel states pays off . a: Accuracy metric corresponding to QoI-vector q td: Timeliness attribute of QoI-vector q l(a): # bits required to represent QoI-vector w/ accuracy metric a Define D < Tmin): Expiration time . : Timeliness parameter i.e. D=20 Extra slot HHS outperforms IF Rayleigh channels Approximate scheduler near-optimal Sponsored by CTA