Download
1 / 11
110 likes | 237 Views
On Reorienting Linked Rigid Bodies Using Internal Motions. Gregory C. Walsh and S. Shankar Sastry. 3 Link System. Configuration Space Q= . z. y. x. Linear and Angular Momentum Conservation. We care about reorienting the system;

E N D
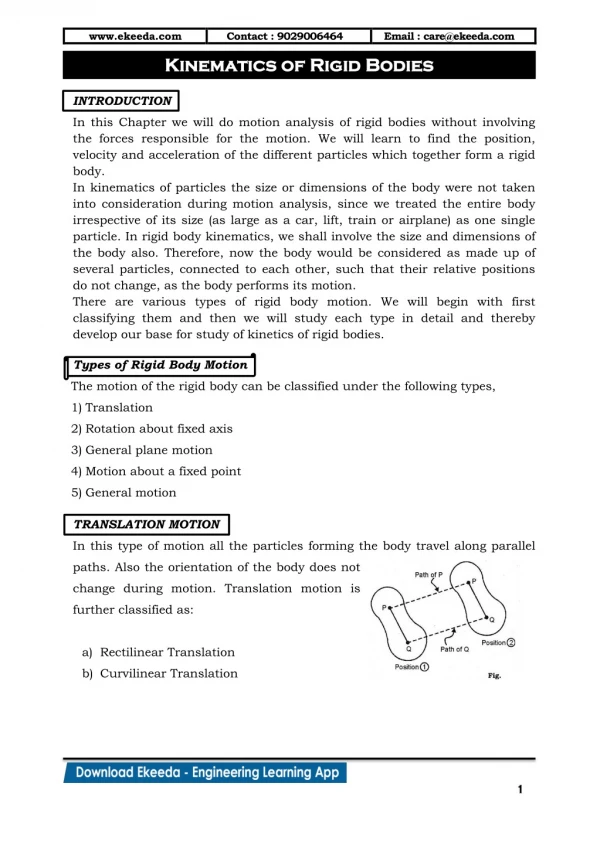
On Reorienting Linked Rigid Bodies Using Internal Motions Gregory C. Walsh and S. Shankar Sastry
3 Link System Configuration Space Q= z y x
Linear and Angular Momentum Conservation • We care about reorienting the system; • We can write down the Lagarangian in terms of each link’s angular velocity; • , and is the angular velocity of the ith body as measured in its own frame.
Angular Momentum • Because of the dual of the Lie Algebra, is identified with • Angular momentum: • (1) • by reorganizing the equation above.
Angular Momentum Conservation Constraint • The inputs (angular velocities) satisfy the angular momentum conservation constraint, conserves the angular moment of the entire system, which is the set of solution to eqn.(1); • Assume zero initial angular momentum: • , where ,are the null space of eqn.(1).
The Planar Skater and are two scalars for the planar skater case.
Movement in the Plane • According to eqn. (1), for the planar skater: • The third row introduces a constraint: • (2)
Lie Bracket • Lie Bracket gives us the net displacement in direction results from movement along
Optimal Control Inputs • To minimize the control effector; • Control effort: ; • Given eqn. (2): • Lagrangian of the system:
Optimal Control • From Lagrangian equation: • We can get the following differential equation:
where , are constant. • So, the optimal control inputs is a circle, in the shape space ,.