Download
1 / 31
310 likes | 479 Views
Control and Monitoring of Front-end and Readout Electronics in ALICE. Peter Chochula , Lennart Jirden, Andr é Augustinus for the ALICE collaboration. Outline. The aim of this talk is to introduce a strategy chosen in ALICE for front-end and readout electronics (FERO) control and monitoring

E N D
Control and Monitoring of Front-end and Readout Electronics in ALICE Peter Chochula, Lennart Jirden, André Augustinus for the ALICE collaboration
Outline • The aim of this talk is to introduce a strategy chosen in ALICE for front-end and readout electronics (FERO) control and monitoring • A vertical slice ranging from user’s application to hardware layer will be described • The ALICE Silicon Pixel Detector (SPD) is used as a case example Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Main goal – study of heavy ion collisions at LHC energies Large Number of sub-detectors optimized for physics performance Detector technologies cover broad spectrum including semiconductors, TPC, RICH etc. The ALICE Experiment at LHC Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
High number of implemented detector technologies, their front-end architec-tures and access paths complicates the task of online control and monitoring • The aim is to separate hardware details from control processes and provide a uniform strategy for controlling the detector equipment. The front-end and readout electronics should be treated as any other device. Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
ECS Detector Control System Data Acquisition and Run Control Trigger System High Level Trigger DCS DAQ/RC TRG HLT … SPD TPC … SPD TPC … SPD TPC LV LV Detector HV HV Subsystems FERO FERO Gas ALICE Online Systems Hierarchy Experiment Control System responsible for coordination of online systems Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
ALICE Standards for External Devices Control and Monitoring • The ALICE DCS is based on commercial SCADA software - the PVSSII • Profiting from collaboration between all four LHC experiments – the Joint COntrol Project(JCOP) • Hardware access is based on two main technologies • OPC • DIM Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
DIM – Distributed Information Management System • Network transparent inter-process communication tool • Standard tool for exchanging information in distributed systems • developed at CERN • Released under GPL • Client-server model supported on multiple platforms comprising Linux and Windows • Information available at http://dim.web.cern.ch/dim/ Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
DIM Operation Principle DNS Servers register accepted commands and provided services Clients retrieve the names of servers providing requested services Services Server Client Commands Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Basic Interaction Between FERO and DCS • FERO controls ranges from downloading of parameters to high-level tasks such as calibration • Monitoring includes direct reading of parameters provided by the electronics or indirect surveillance using associated equipment (power supplies etc.) • Corrective actions are expected from the control system in case of anomalous values (errors, excessive readings etc.) Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
ALICE front-end architectures • ALICE Dynamic Data Link (DDL) is a standard for collecting physics data, it can be used also for downloading configuration parameters • Several detectors decided to implement alternative control paths as a response to their complex architectures • Deployed technologies include JTAG, CANbus, Profibus, Ethernet, Easynet and private buses • Controllers are implemented typically as PCI or VME cards Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Class B Class C Class D Class A • alternative technology such as Profibus, Ethernet, Easynet etc. is used to configure FERO • FERO configuration can be performed via DDL and optionally using alternative techno-logy (Profibus, Ethernet, etc.) • FERO configuration is implemented via DDL • Monitoring is based on different technologies • Configuration and Monitoring are sharing the same access path to FERO Configuration Configuration Configuration Monitoring Monitoring Monitoring Configuration Monitoring Non-DDL technology Non-DDL technology DDL DDL FERO FERO FERO FERO FERO Control and Monitoring Strategies in ALICE • Four different FERO architecture classes should be transparent to upper software layers • FERO should be treated as any other device: • accept commands • publish status and gathered data Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
The Front-end Device (FED) • The FED makes implementation details transparent to higher software layers • FED encapsulates hardware and software into a unit • Accepting standard and detector specific commands • Publishing standard and detector specific data Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
The Front-end Device (FED) DAQ/RC DCS Class A+B Control DIM Client DDL SW Monitoring of all classes FED DDL SW DIM Server Control CPU Control CPU Profibus, JTAG, etc. DDL FERO Hardware Layer Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
The Front-end Device (FED) Class B,C,D Control DAQ/RC DCS Class A+B Control DIM Client DDL SW Monitoring of all classes FED DDL SW DIM Server Control CPU Control CPU Profibus, JTAG, etc. DDL FERO Hardware Layer Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
The Front-end Device (FED) ECS Class B,C,D Control DAQ/RC DCS Class A+B Control DIM Client DDL SW Monitoring of all classes FED DDL SW DIM Server Control CPU Control CPU Profibus, JTAG, etc. DDL FERO Hardware Layer Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
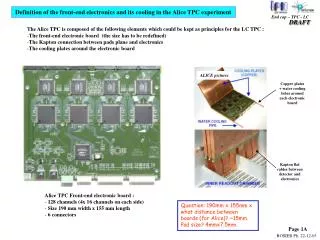
MCM ALICE SPD as an example for FED Implementation Basic SPD block seen by online systems is a half stave Laser and Pin Diodes • GOL - Translates data into G-Link compatible 800Mbit/s stream and drives the optical laser component Digital Pilot –receives trigger signals, controls chips, reads analog pilot Analog Pilot – provides reference voltages, ADCs for monitoring ALICE1/LHCB Chip – reads signals from bump-bonded pixel sensors Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
SPD Operation Modes • Configuration Mode: • JTAG Bus is used to configure ALICE1 chips • Monitoring of MCM is suspended JTAG • Operation Mode: • ALICE1 chips are taking data • JTAG Bus is reconfigured and services only the MCM • MCM is monitored via JTAG Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
SPD Readout Architecture DCS DAQ VME Router Card PCI-MXI-II-VME JTAG, CLK, Detector Data Trig ~100m 1 router services 6 halfstaves SPD contains 20 routers Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Architecture of SPD Control and Monitoring Software Client Software (PVSS) DIM Client Data, flags Commands Monitoring Agents (MA) are implemented as separate thread DIM server Control and Monitoring (C/M) Server CA1 Database CA2 MA1 MA1 VISA PCI-MXI-VME Control Agents (CA) react to commands received by the server Monitoring Agents (MA) publish data as DIM services Router SPD Halfstave MCM Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
SPD C/M Server • SPD Control and Monitoring Server (C/M) is one and only access point to the hardware • C/M server accepts commands and executes them • It arbitrates access to the hardware • Synchronizes internal execution of agents • Main (DCS) role of the server is monitoring of sensitive detector parameters • Acquired data is published as service Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Recognized commands General: Initialize Re-initialize Calibrate Modify Running parameters Publish Active Settings SPD Specific Test Readout Test JTAG Test SEU Start/Stop Agents DIM Interface of the SPD C/M Server Published services • General: • Server Status • Agent Status • Messages • Detector data: • Temp • I, V • Status and error flags Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
C/M Server Setup Server Operation Parameters Debugging Level Control Debugging Output Control Internal Agent Status Monitoring Settings • The Server Setup Panel allows tuning of server operation and debugging • sets monitoring limits and refresh rates • controls complexity of published messages • controls publishing of debugging informatio Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
C/M Server Control • Server Status Info: • Operational • Initializing • Calibrating • Checking JTAG • ….. Server Commands • Agent Status Info: • Suspended • Executing • Idle • The Server Control Panel allows sending commands to the FED • On receipt of command C/M Server: • Suspends monitoring agents (if needed) • Performs requested task • Resumes agent operation Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Mesage Severity Time & Date Caller Detector Example of PVSSII Message Viewer (based on DIM service) Messenger Service and Message Viewer • Messenger Service provides information about server’s operation • Complexity of published messages can be remotely tuned • Message destinations: • DIM based viewers • Logfiles/screen • Windows Event Logger (ActiveX) Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Detector Data Subscriber PVSSII is the main DCS operation tool PVSS client subscribes to data published by the C/M server Gathered data is treated according to DCS recipes Data in this panel is updated according to server settings (frequency,deadbands, etc..) Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Automatic evaluation of communication status Server operational but no data published Connection to Server lost! OK Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Optional DIM clients • Although PVSSII is the main DCS operation tool, it is not required to have it running in order to monitor data provided by the C/M Server • Additional clients such as Custom C++ clients, DimTree or DID can connect to C/M server in parallel to PVSS client Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
SPD Configuration Data • Configuration needs to be downloaded for MCM and ALICE1 chips • Most data (~50 Mbit) goes to total number of 1200 ALICE1 chips • Settings for integrated DACs • Individual pixel thresholds adjustments (8192 3-bit registers/chip) • Mask Matrix (8kbit/chip) • Optional test bits for debugging (8kbit/chip) • Configuration database stores only template data (for ideal chips) and deviations from this for every installed chip - compression factor ~40 achieved Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Ready Re-initialize Go-STDBY Calibrating Initializing Calibrate Initialize Standby/ Not Configured Power is On AND C/M Server Operational OFF/Unknown Integration of FED into the DCS • FED can be described in terms of state machines and integrated with DCS using SMI++ interface Detector specific commands and states Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Applications of described approach outside the FERO Domain In principle the described concept can be used to access any equipment requiring remote supervision DIM DIM C/M C/M VISA VISA RS-232 RS-232 or Ethernet Stepper Motor Controller Non-standard Power Supply Mirrors adjustable by stepper motors Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam
Conclusions • Described model allows for control of non-standard devices in ALICE • The front-end and readout electronics is treated as a device. The developed software makes all hardware details transparent to higher software layers • The concept of FED can be extended also to other devices • Present prototyping shows encouraging results Peter Chochula – ALICE DCS Presented at LECC 2003 Amsterdam