Download
1 / 1
10 likes | 259 Views
High Performance Cobotics. Eric L. Faulring, Laboratory for Intelligent Mechanical Systems (LIMS) Northwestern University, Evanston, IL J. Edward Colgate, LIMS Laboratory, Northwestern University, Evanston, IL Michael A. Peshkin, LIMS Laboratory, Northwestern University, Evanston, IL.

E N D
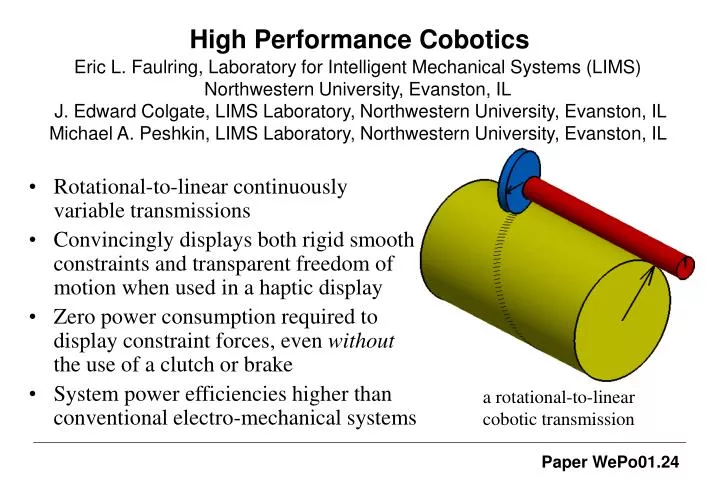
High Performance Cobotics Eric L. Faulring, Laboratory for Intelligent Mechanical Systems (LIMS) Northwestern University, Evanston, ILJ. Edward Colgate, LIMS Laboratory, Northwestern University, Evanston, IL Michael A. Peshkin, LIMS Laboratory, Northwestern University, Evanston, IL • Rotational-to-linear continuously variable transmissions • Convincingly displays both rigid smooth constraints and transparent freedom of motion when used in a haptic display • Zero power consumption required to display constraint forces, even without the use of a clutch or brake • System power efficiencies higher than conventional electro-mechanical systems a rotational-to-linear cobotic transmission Paper WePo01.24